Hello,
I would appreciate someones help in telling me why I have multiple GYR, IMU, BARO, ACC, etc in my logs (e.g, GYR_1 up until 5). Same thing goes for the EKF data in XKF.
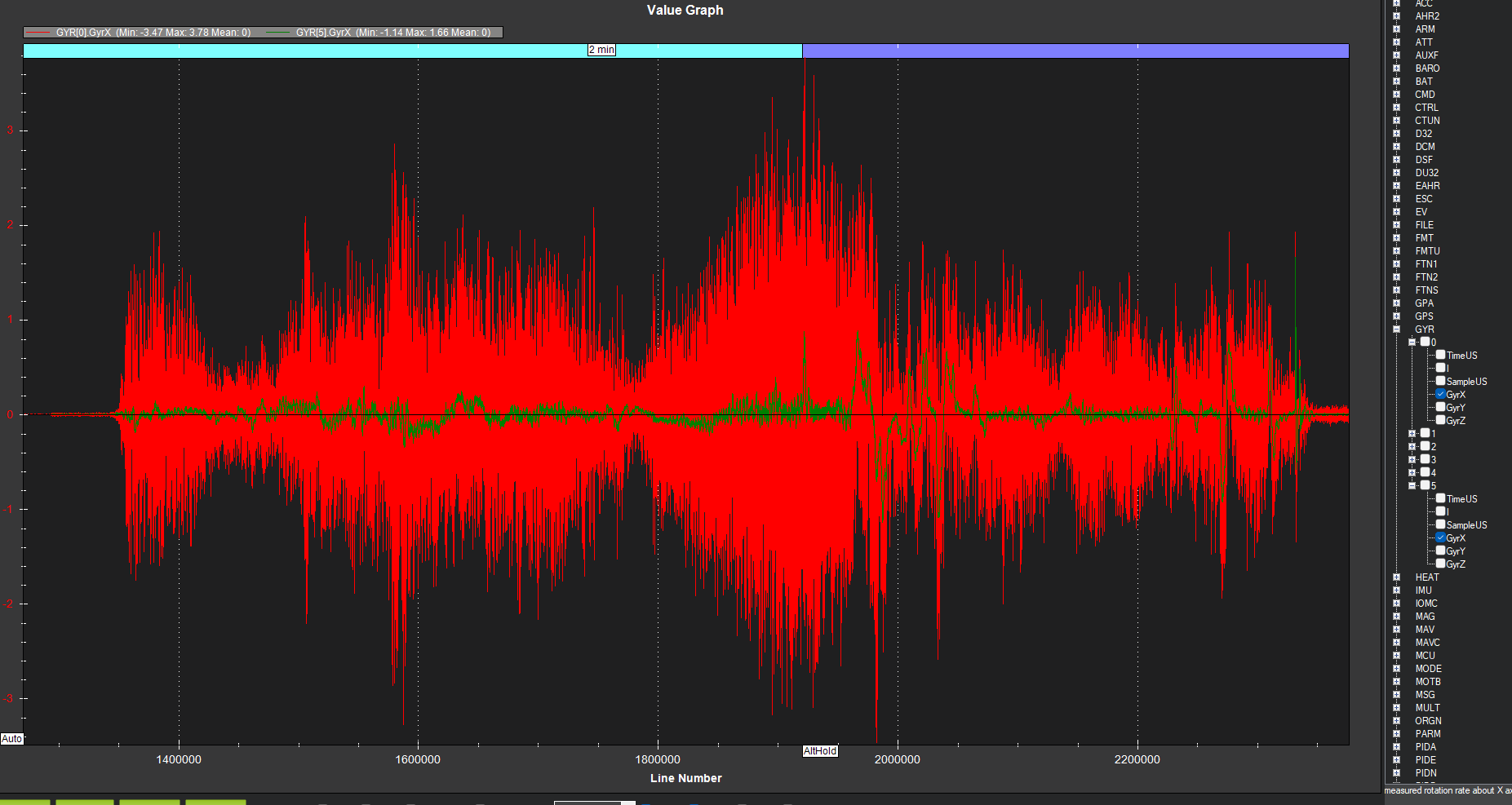
I have noticed the difference between GYR and GYR_5 is lower frequencies or oscillations but I would like to have a deeper understanding on the purpose of it?
Two additional requests:
In GPS i have some data that are missing. Anyone have explanation for that? How can I fix it?
I have followed recommended steps on manual and auto tuning. Could you please advice me if there are anything i can do to have better (in terms of stability and less oscillations)? As I have some high vibrations on the x and y-axis during high maneuvers.
I know the tool. I have used it to configure my drone and fly safely and I have tuned the controller.
I am not sure why you shared the link although my question was refering to logs containing multiple fields from the same source. And some data is missing.
If I have missed something from your tool that is specifically pointing out these issues, ill be grateful if you enlight me. Thank you