Let me ask a dumb question.
I am using the X frame the diagram shows 3 1
2 4
What do these numbers represent? The servo number?
Also, when I push TestA is that moving servo 1?
Let me ask a dumb question.
I am using the X frame the diagram shows 3 1
2 4
What do these numbers represent? The servo number?
Also, when I push TestA is that moving servo 1?
I can report some progress.
My roll and pitch were reversed , the sticks that is, so I fixed them using the RCMAP option
Now it seems that config #2 works except that the pitch needs reversing.
So where do I revers the pitch stick? Must be in config
You are doing too much at once. Gimme a min to sort motor order. Quit changing configs!
SUCCESS!!! I swapped pitch and roll using RCMAP, then I reversed the pitch using the rc2 config option. and I am using config #2 Parameters that I received yesterday.
And the motor test completes correctly?
I think so. They go CW starting at the top right as below
D A
C B
I do not know how Allister got his config numbers but I would like to know how.
EDIT: See follow up.
On the attachment today that had two configurations, the left one is conf #1 and the tight one is conf #2. Conf #2 works if I
Now everything works but I do not know why.
The stick movements cause roll, pitch, yaw, and throttle correctly. The HUD corresponds to me physically moving the drone, and rolling the drone with the motors at idle causes the correct motor operation.
I just do not see how the numbers 36,33,34,35 for servo 1,2,3 and 4 were obtained.
I don’t understand the motor test feature. I would expect pushing TestA to activate servo 1 and that would be M2 this is OK, then I would assume that pressing TESTB would activate servo 2 which is M1 but it doesn’t. ???
I keep wondering if there is a mixup in the wiring between the FC and the ESC. I did connect pin to pin but I wonder if there is some sort of reversal here. I am just guessing at this point.
All of your discussion regarding RC mapping is useless in this regard, and your ground tests are inconclusive for reasons already stated, though it does seem that you had to reconfigure some radio settings for proper stick assignment.
Forget what servo number.
Motor A - Front right.
Motor B - Back right.
Motor C - back left
Motor D - front left.
Allister, your list is correct. Why?? What is the magic??
Ok, I sorted it out, and the configs do not conflict, as I’d previously stated. Config 2 should indeed work, as you indicate that it does.
Here’s the logic:
Test A controls Motor1. In both of your configs, Motor1 is connected to Servo2.
Test B controls Motor4. In config 1, that moved the front left motor, meaning that Servo4 (which was set to Motor4 in that config) is connected there, so Servo4 should actually be set to operate Motor3.
Test C controls Motor2. In config 1, that moved the back right motor, meaning that it is connected to Servo1 (which was Motor2) but should actually be Motor4.
And that leaves only one option left for Test D.
The real key is to know which motor is physically connected to which output, which we can do by the process above or, far more conveniently, by tracing the wiring to know which SERVO output corresponds to which corner of the drone.
The following image shows the physical SERVO output connections for your Copter.
It’s very simple: RTFM.
Allister, can you point me to where in TFM I should be reading please??
See my edit above.
You were constantly conflating ESC labeling with ArduPilot parameters. The only thing that the labels do is allow you to more easily determine the physical connections to the autopilot.
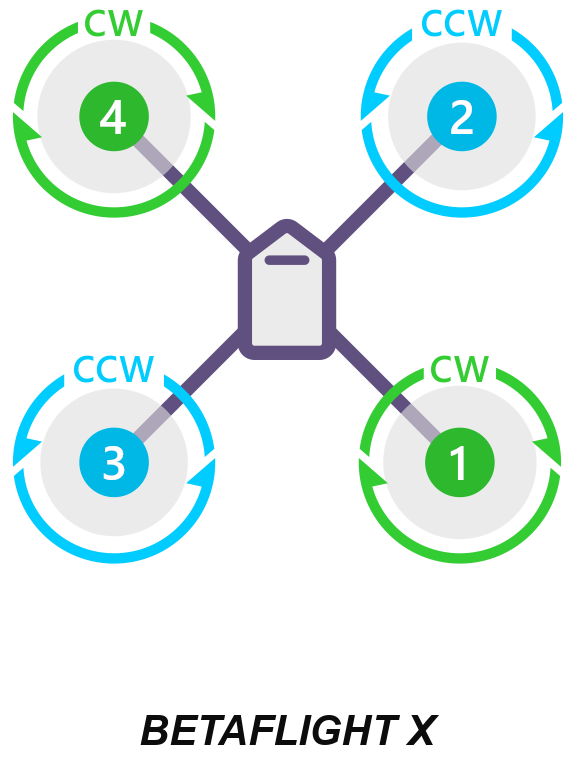
If we’d known from the start that your config matched the image below, we could simply have had you set FRAME_TYPE=12 (BETAFLIGHT X), and you could’ve set Servo1=Motor1, Servo2=Motor2, and so forth.
I got it now. The main thing is that it all seems to work.
Thanks Allister and Yuri
I was about to toss the entire project. Well, not really, I don’t give up easily.
Yuri. I did show initially that I was using an X frame. See my very first attachment.
NO NO NO. I am using the default X frame not the Betaflight X.