I’m working through the tune steps on a new Tarot X4 with 22" props.
I’m working through slowly and carefully through the wiki - there have been lots of really good updates. Thanks to whomever has made these improvements to the wiki!
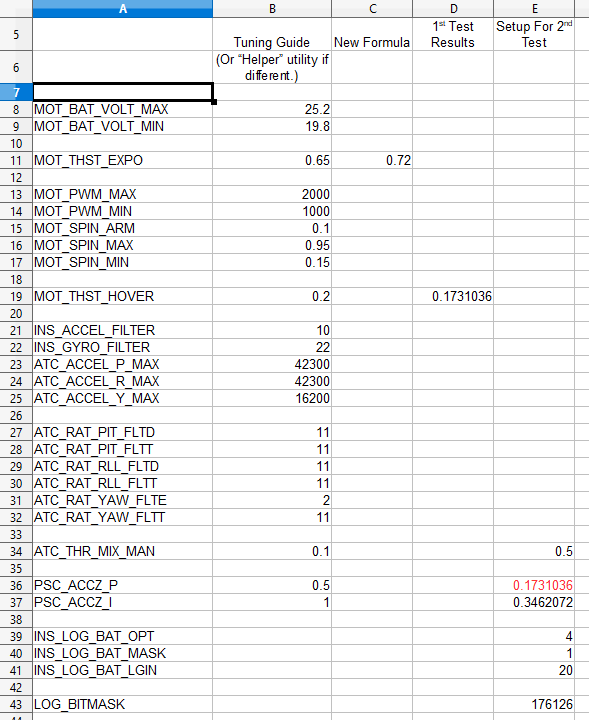
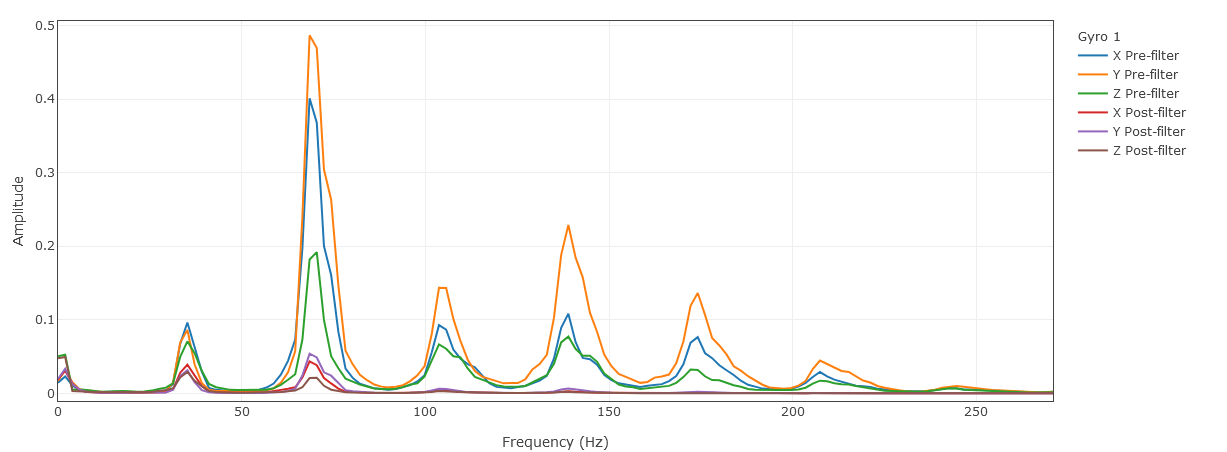
I’ve just turned on the IMU batch sample options - to view the vibration status - and identify the peak frequency.
As I understand the charts - it appears as though the low-pass filters are already providing massive attenuation to the vibration. In fact, I’m now wondering if setting up a notch filter is needed at all.
I’d really appreciate if someone would take a look at what the data is showing - and help me understand it a bit better - so I can move on to setting up an appropriate RPM notch filter.
I would say it is definitely worth it.
You are correct that the standard INS_GYRO_FILTER does knock out quite some noise. But less is more in this case
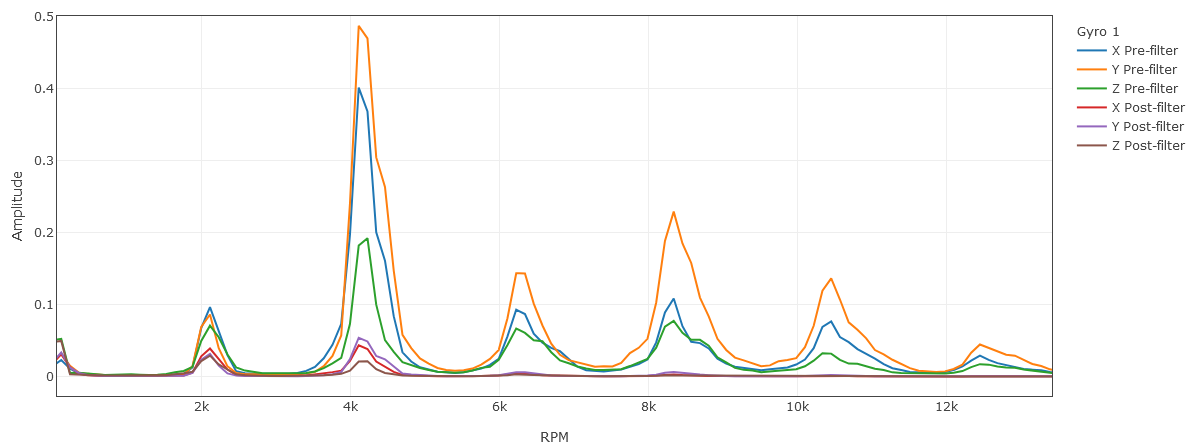
You have ESC RPM data available so that will make it easy. BUT the trouble is Ardupilot is logging RPM at about 4500, where as the noise is around 2100 RPM.
So I would say you have the SERVO_BLH_POLES wrong for your motors.
Graph of noise on an RPM scale for reference:
Once you plug in the correct number of poles (count the magnets in your motor) then you can set these:
INS_HNTCH_ENABLE,1 // write then refresh params to see the rest
INS_HNTCH_BW,10
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,30
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,2 // per-motor notches
INS_HNTCH_REF,1
And this should cover you for any eventuality, including different payloads, or a changed COG.
You are using the updated MOT_THST_EXPO value. This can have a very slight effect on MOT_THST_HOVER but mostly yours is low because the copter has plenty of thrust it seems.
Overall that log looks good for a first flight. I’d say you’ve done a good job on construction and attention to detail. That time spent on the bench makes flights so much easier.
I would say you can safely try these right away:
ATC_ANG_PIT_P,6.0
ATC_ANG_RLL_P,6.0
ATC_INPUT_TC,0.20
ATC_RAT_PIT_D,0.004
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.004
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
ATC_THR_MIX_MAN,0.5 // you have a low risk of fly-away
LOG_BITMASK,180222 // log PIDs too
EDIT:
I meant to mention in the first post: X axis vibrations!
Not disastrous but less than ideal.
Needs a bit of work and is likely causing all those peaks on the noise graphs.
Probably something like flight controller wiring pulled tight one way, or very uneven vibration damping. Maybe prop balance…
Thank you for bringing up the number of poles - I was wondering about that -
The spec sheet for these motors say that this motor has 14 pole pairs. So I have the “poles” parameter set at 14. Maybe it should be 28 for individual poles.
The sanity check is what rpm would one expect for 22" props. I’m showing 4000 rpm in hover. If I set the “poles” parameter to 28, I’m guessing it would show 2000 rpm in hover.
And as the default parameter value for “poles” is 14 - I just went with that.
Counting the number of magnets on these motors is possible - but not exactly easy.
I’m thinking I’ll just change the number of “poles” to 28 and re-fly the initial test flight and look at the charts again.
Any thoughts or suggestions before I re-fly the test?
Interesting - I don’t find it in the web page for the motor - but the recap on my thread post mentions that the motor is a 24N28P. Odd that I can’t find that on the web page for the motor. But I guess that settles the question about the number of poles.
I dont know why some manufactures have to try and be different and say something so ambiguous as “14 pole pairs”
I think it will be 28, but you could try 24 if that’s not quite right.
Just send a log of a tiny test flight with either and we will know for sure.
EDIT:
For those following 28 poles was confirmed correct - frequency and RPM match in logged data.