can someone help me to understand why my drone crashed? i raised up to 140m, then switched mode to stabilize and put throttle down, motors went off (did this 100times before, if throttle up again drone catches itself immediatelly)… this time drone put motors back on again, started spinning - and despite i gave full throttle - motors only running slow until crashed…
can you help me to understand what happend and how you found it? i analysed the log but didnt find a reason
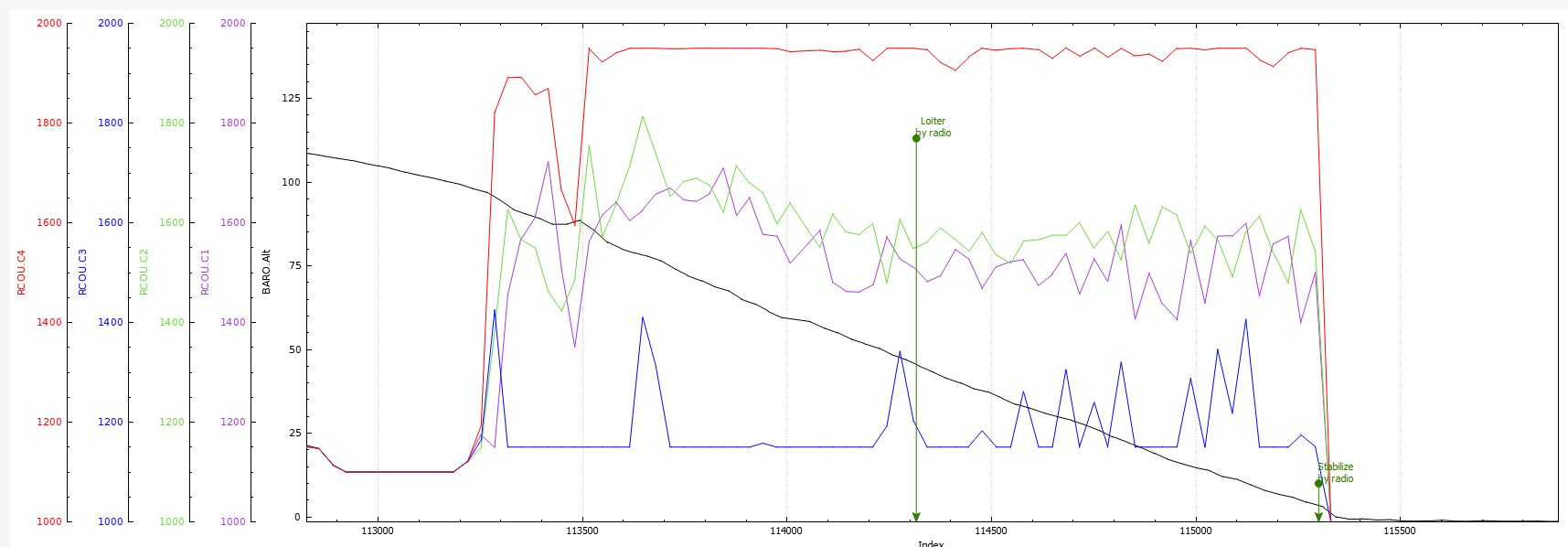
It looks like a loss of power on Motor 4 (output to max) with the tell-tale response on Motor 3 to zero to compensate. Motor, ESC. prop failure? Maybe those flips fatigued something.
Thank you very much @dkemxr - i would probably have never found it…
After Crash i checked motors… every motor spinning fine what would you do/check to prevent next crash?
btw: what cool tool are you using to analyse the logs?
If the props spun fast in the wrong direction during fall, it could be this ESC never got in sync in time.
using acro and pitching/rolling 90° can prevent this. (and you will usually get down much faster than with freewheeling props that are level.)
Thank you @Andre-K for your response. I always wondered if it is really a good thing to have the propellers turned “off”… how can i prevent this? What do you mean with using acro…? I was in stabilize mode…
Thanks so far!
read about MOT_SPIN_MIN and MOT_SPIN_ARM, so that a minimum of stable rpm is maintained even at rapid descent.
ACRO is a flight mode, using it you can make the copter maintain a stable pitch or roll attitude while falling, (fall forward or sideways) , so that there is no big aerodynamic load on propellers, and they will have less trouble maintain rotation in correct direction(and be able to spin up on demand.
 what would you do/check to prevent next crash?
what would you do/check to prevent next crash?