After aborting an auto tune run (due to wind) and flying for a minute the copter did an uncontrolled descent whilst yawing and landed smoothly.
I’m trying to understand if I have a hardware failure that caused the descent or simply a setup issue. Everything seems to bench test ok.
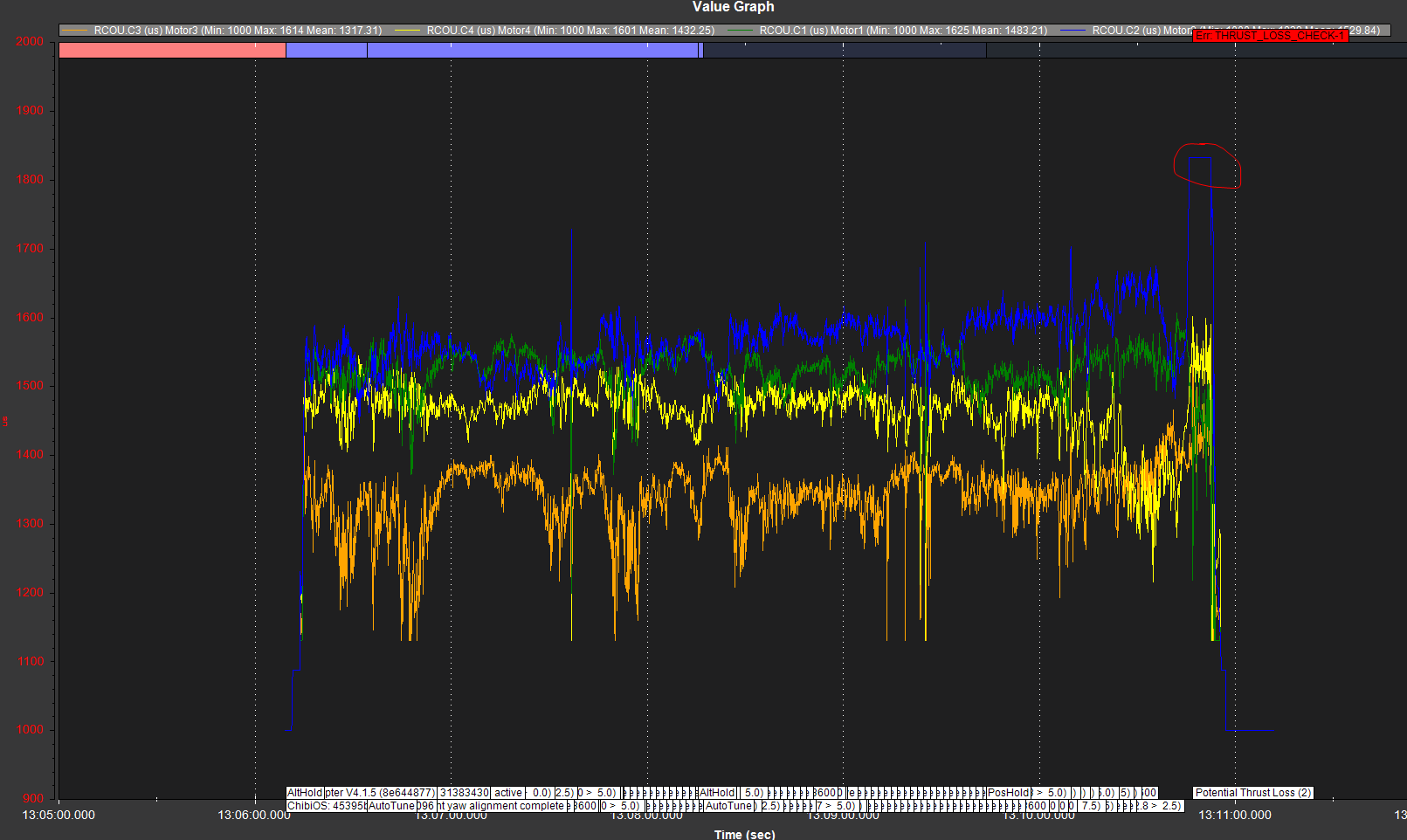
Since reviewing the logs and forum I can see that the PWM graph shows that 2 of the motors are not aligned. On inspection I can see this is due to slightly bent frame from a previous misadventure. I’ll replace the frame no worries but concerned that there is also motor/esc issue on motor 1 or 2 that cause the descent.
Do I need to replace Motor and ESC on Motor 1 or 2?
Log file: WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
The red circle shows PWM on motor 2 go to 100% at the start of the descent.