Hello, I have made a 1.5m fixed wing tail sitter with quadcopter setup, no control surfaces, x type,
Matek 405 VTOL, independent ESCs, 11inch props…
Everything was perfect during configuration/paramaters settings/initial testing/motor directions…
But when it came for the first flight its starts Yawing out of control and had to land it immediately (Qstabilise mode). Tried again in by having my colleague holding it by the nose lightly (just to not let it crash) and checking for pitch and roll, they were good but not yaw. Again, tried but keeping it in QLOITER mode, hoping FC saves it but no good, hover with continuous Yaw and had to land it…then end of the day
Next day tried playing with Q_A_RAT params but no good, only little improvements were seen - able to change the yaw direction (the control seems opposite but still at least able to change the direction).
Please help… attaching the full folder containing the bin files of both days and also videos and photos.
Note- on second day after some time I removed the GPS and forced armed to QSTABILISE mode to check so some bin files (37-40) are without gps and force armed along with some trial is FBWA mode.
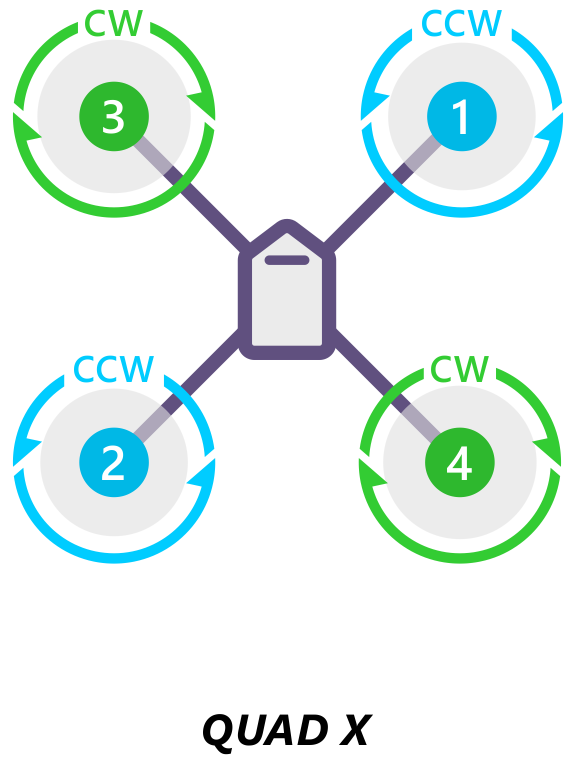
Motor direction was the first thing that came to our minds, because we did as it was shown in tailsitter documentation.
The documentation only has 2 photos - one for ‘plus’ and one for ‘X’ config, and the ‘X’ config shows different as compared to normal Arducopter X; its more like ‘H’ than ‘X’.
Which is why I also put the top view photo for the motor direction to be seen… Please let me Know if I am wrong somehow.
I did try to put the motor config in X conifig as it is in Arducopter versions but then RC input of Roll responds with inversed side by side movement and RC input of pitch responds with Reversed Cross Movements ( pitch back- forward-right movement and viceaversa )
Same thing happened when I changed the Q_FRAME_TYPE 1(X) to 3 (H)
“No yaw torque” means that only control surfaces are used to control yaw.
Since you don’t have any control surfaces, this frame type won’t provide any yaw control.