have struck a weird issue with a new hex that I have been working on. I have built quite a few Hex platforms with ardupilot flying the cube and have never encountered this before.
I have uploaded logs but it is worth noting the copter is not yet tuned and I am trying to get it in the air to do an autotune so I know it will be pretty sloppy tuning wise.
A little about the aircraft.
960mm frame size
KDE 400kv motors
KDE ESC’s
Spektreworks carrier board.
CUBE black
Here2 gps (primary)
Here+ gps (Secondary)
What I have tried so far.
Checked that all motors were going into the right channels in accordance with the Spektreworks manual.
Checked motor directions
Set the esc’s in accordance with the specific ardupilot guidance in their manual.
increased the yaw pids to see if anything changes.
Still does not seem to change the result.
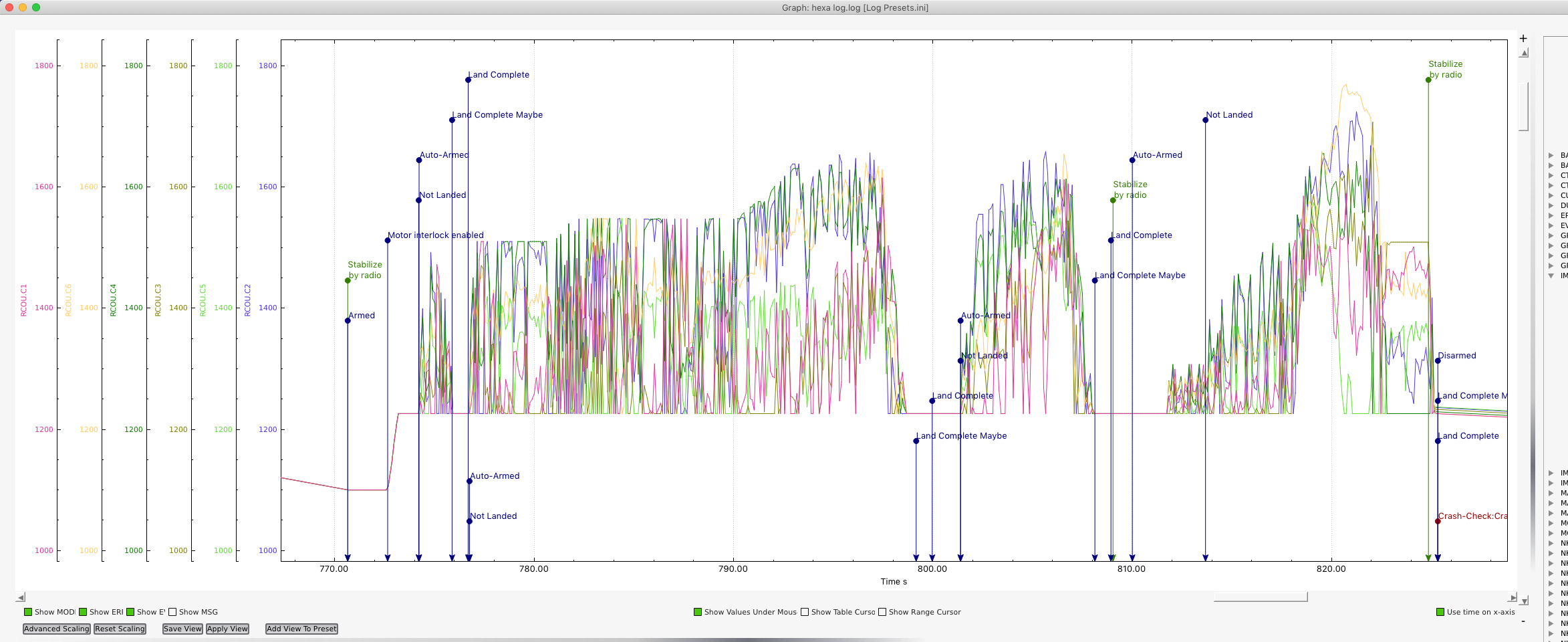
Thanks in Advance! Log
Thanks for the assessment in this log the last section is the only example of actual flight the others were armed a throttle up but at best there was only a small hop.
If the vehicle is overpowered why would that cause a yaw event?
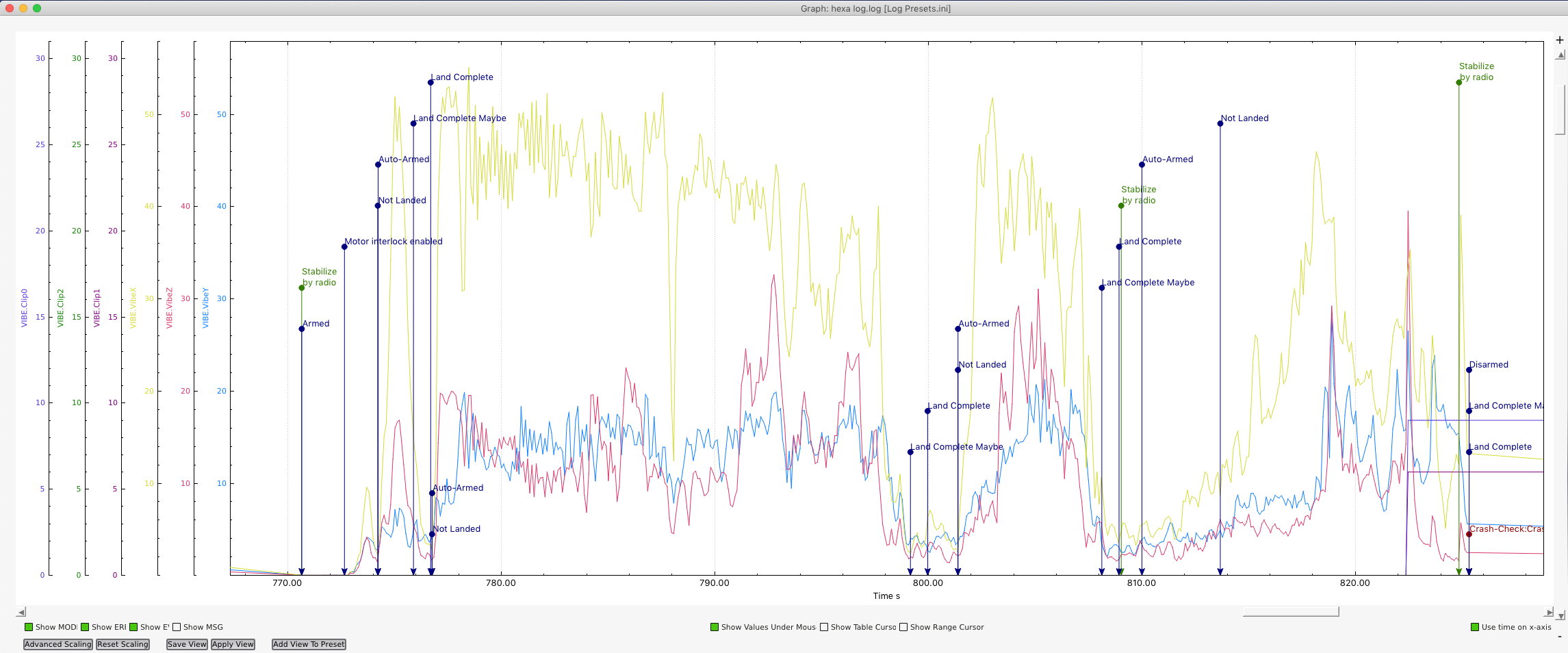
Do you think the vibration is causing the procession?
For stability and yaw control you need the props to be able to counter one another.
To Yaw, for eg, CW props speed up, CCW slow down, THE SAME AMOUNT, to maintain constant thrust.
So if you can’t slow the CCW down enough then the CW props are going to take control.
Same with stability.
Try adding some weight, or better, a bigger battery, and see how it goes.