My hexacopter is built on plus configuration. During pitch-back, my copter experienced an uncontrolled cw yaw rotation and it barely avoided the crash. I checked the logs and I dont think it was related to the magnetic interference.
All the information related to the drone, logs, video and parameter file is in this link: https://drive.google.com/drive/folders/13r3YTEF_Y74td9pVxdB70ZD60YYGd4-i?usp=sharing
This does not look like it was tuned with the ArduPilot Methodic Configurator software.
Can you do that and post the .zip file that the software automatically creates in the end?
Anyways, i would like to give some update about my problem:
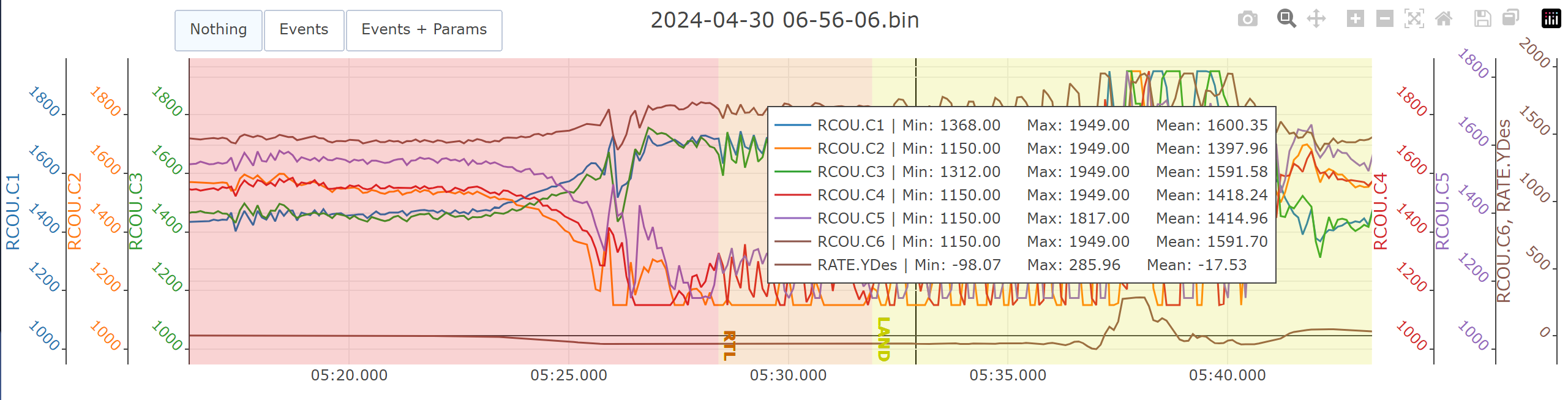
The uncontrolled clockwise yaw rotation happened because somehow ardupilot had given a signal for all the ccw motors to run at minimum rpm while all the cw motors to run at more rpm. This can be seen in logs in RCOU.
Please note that the motors were leveled (we checked it before and after the flight), motor arms had not twisted. There dont seem to be any magnetic interference as well.
In my analysis, I’ve realized that ardupilot itself has given a signal for all ccw motors to slow down. But I dont know why it would do that.
I would be grateful for any theories or suggestions.
Thank you in advance
Hey thankyou for replying!!!
The thing is that this drone has been flying for past 6 months, other than minor issues like altitude drop (minor) the flight has been smooth. This incident happened only once during its entire life cycle. So personally I dont think this is tuning issue (Please correct me if I’m wrong).
I’m concerned about the drone and also about the people around it.
Any help would really be appreciated!!!
Update to latest Stable. No point in troubleshooting V4.3.7
And then Tune this craft. There are a lot of default parameters and other features not configured at all.
We already shared theories and possible solutions.
And we do think that your diagnosis is incorrect. Is not the FW that is causing the imbalance, it’s the hardware. The hardware imbalance is causing the FW to compensate for it.
Fix the hardware issue by reading section 1 of the Blog post. And configure the vehicle by reading the rest of the post.
Try to not get creative while configuring. Any deviation from the procedure will only create a worse tuned vehicle.