After few short flights to tune our frame ( cube orange with Herelink and GPS 3), we changed some params and recalibrated the mag.
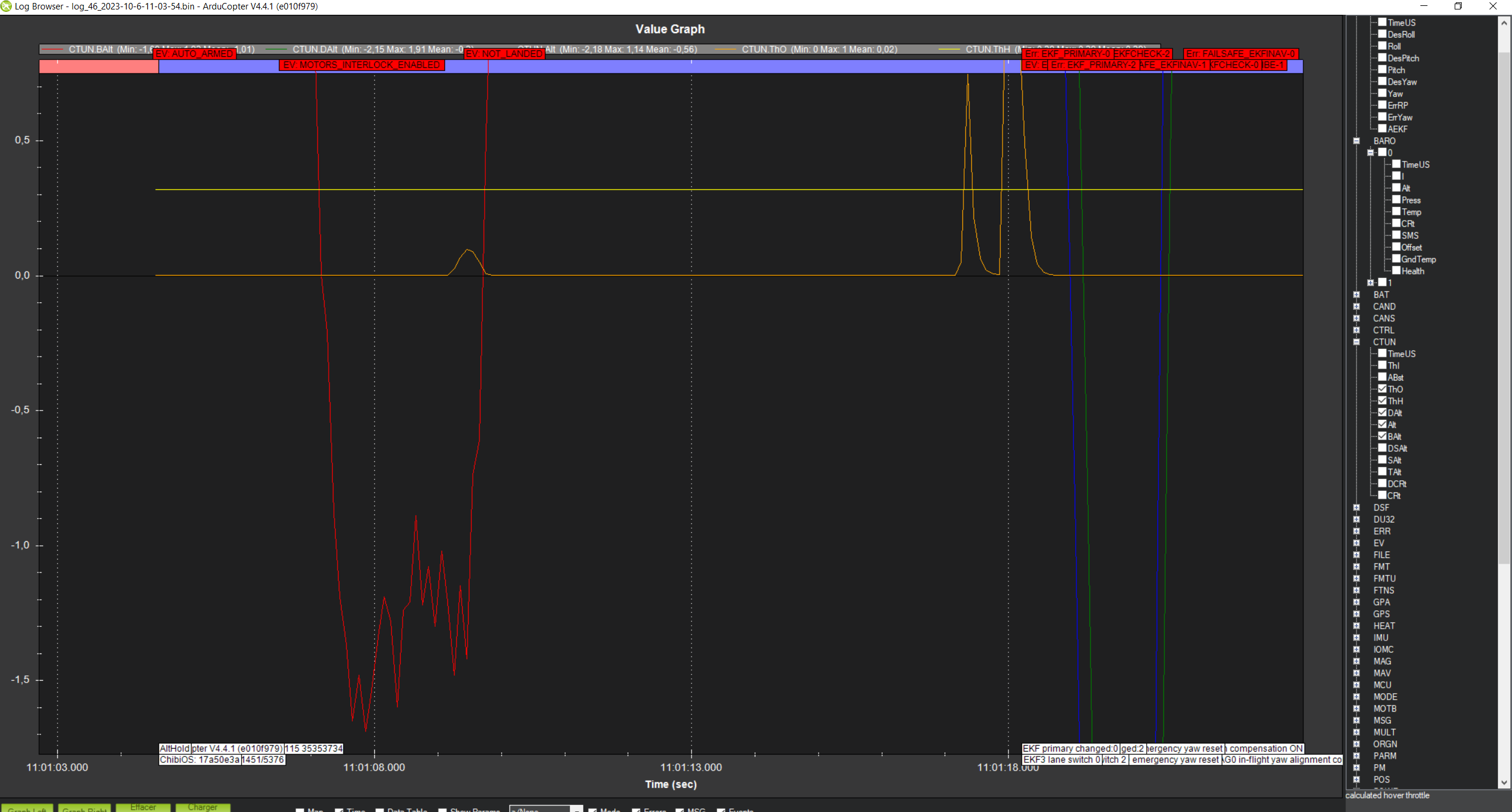
Then we did a test flight with Althold mode activated. The drone directly after take off start climbing (even with throttle down) and add was quickly rotating clock wise. And crash few second later…
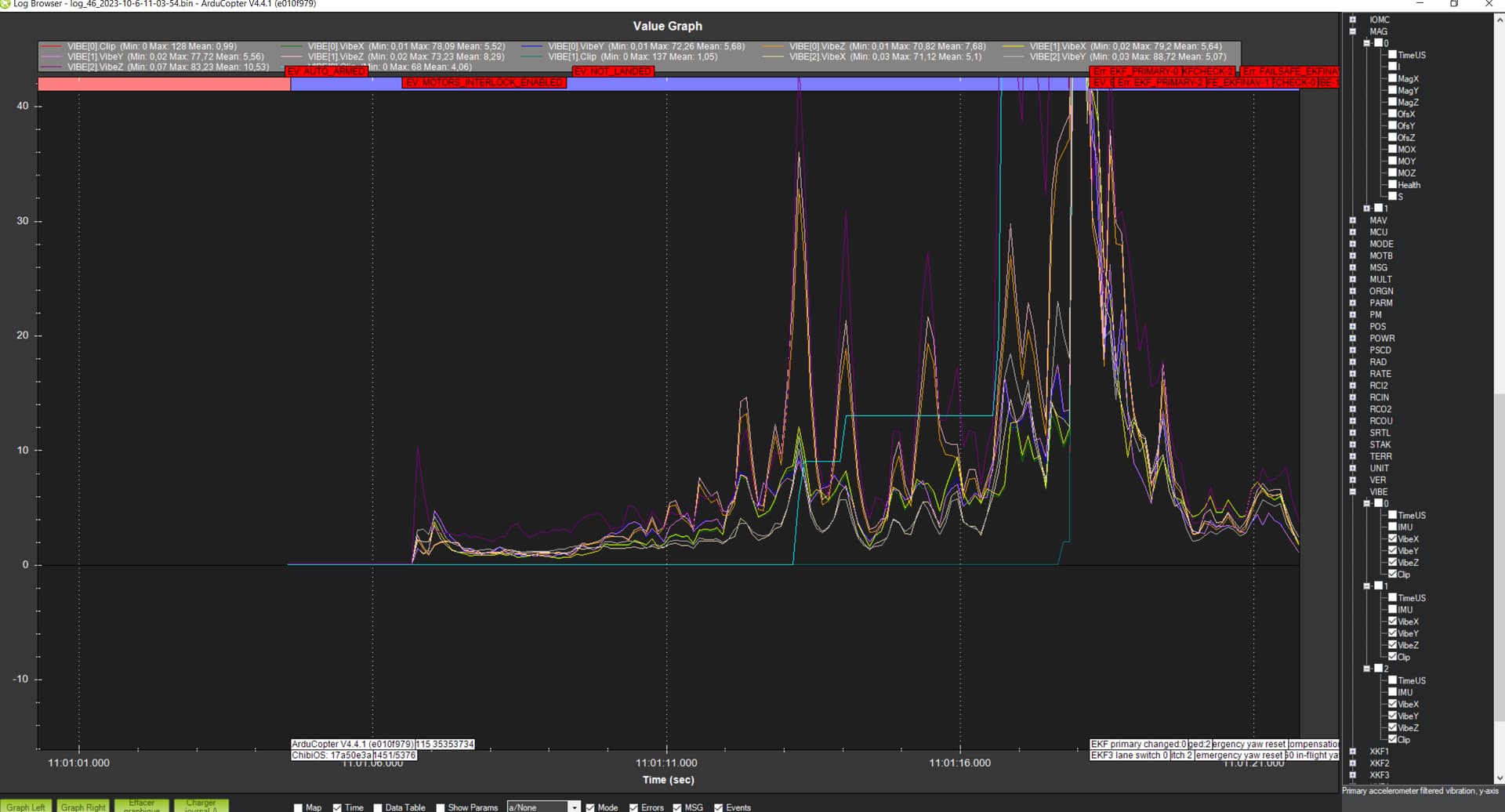
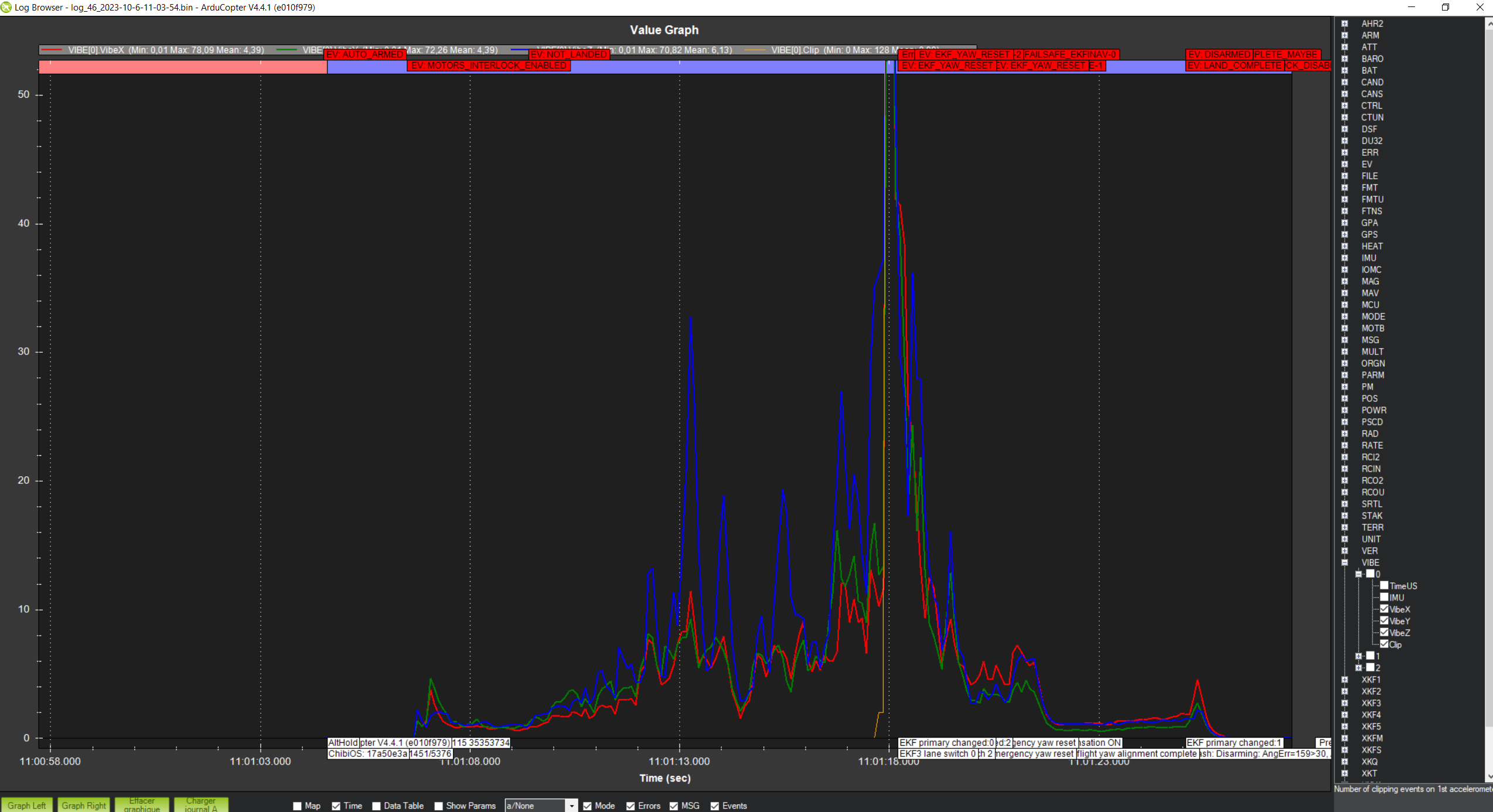
We did check the logs. Vibrations seem to be ok. So we have no clue to know where to start looking …
Only our MAG seems off.
Hello @Maeldd,
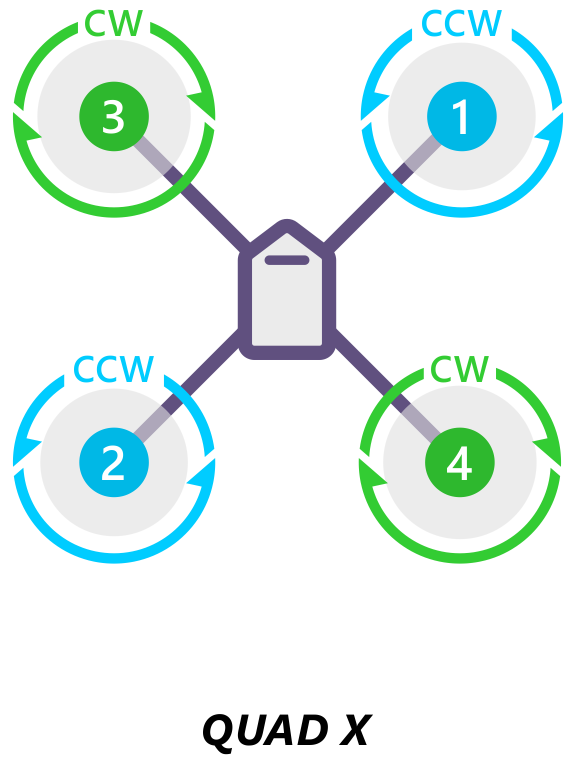
from the log I see motor 3 and 4 have a higher output than motor 1 and 2. Motor 3 and 4 should rotate Clockwise, so they should apply a torque on the quadrotor counterclockwise.
But on your video the quadrotor seems to rotate clockwise.
Of course you can’t change the motor rotation via ArduPilot parameter, but if my reasoning is not wrong (it’s late where I am now ) it seems you have some motor spinning in the wrong direction or some connection issue.
your are right ! But what happened … because we didn’t change our hardware. I have to investigate. That explains the yaw issue and the altitude issue I supposed (it trie constantly to stop the yaw so increase the throttle ? ).
Vibrations above 20 are usually bad, it can depend a little on which flight controller you have, but hitting 30 or more is definitely bad.
Over 15 is getting into a grey area of “this can go either way”.
Under 10 is good.
Yes we are working on it @xfacta . But the part where it goes over 10, the drone was way over its limits of flight so I don’t know if it’s really relevant .
Maybe describe your copter in more detail, at least your prop size and I could better estimate the HNOTCH parameters.
In that short log, 2 motors are at minimum practically the whole time, and the other two motors oscillate between maximum and minimum.
I would say there’s a problem with the spin directions, maybe twisted motor mounts, along with stability/tuning, causing the copter to ONLY be able to rise in order to try and stabilise - there is no way it can descend and still try and remain stable. It would have to knowingly kill itself by shutting off motors to fall.
Hey @Maeldd, just came in my mind that maybe the issue is not the motor direction, in particular if it wasn’t the first flight and you didn’t do any hardware changes. The same behaviour could happen if a motor is tilted, so it applies a torque on the quadrotor in the opposite direction.
I’ve had this experience when I forgot to tight the motor support screws, causing the motor rotation along the arm axis.
Thanks for your help, our quad fly now very well. Really stable ands locked in stabilized mode or loiter mode. The main issue was motor tilted and not uniformly.
I have only one question left (surely out the scope of the initial question) : the flight controller seems to be “fighting” against the pilot in the loiter mode (no issue in althold for exemple, it’s really fluid). When we turn with pitch and yaw/roll mixed, we seems to have small oscillation like the back is dancing. Any clue ?