Problem:
My hexacopter constantly wants to yaw to the right (clockwise). (Only R/C input is a little throttle to get it airborne and it starts rotating on its own immediately)
Build:
Pixhawk Flight Controller running 3.5.5 firmware
Taranis X9D Plus radio with X8R receiver
Ublox NEO-M8N GPS/Compass
T-Motor 240kv motors with 60A ESC’s
12S lipo, 16000mah battery (Tattu)
Configured using MissionPlanner version 1.3.52
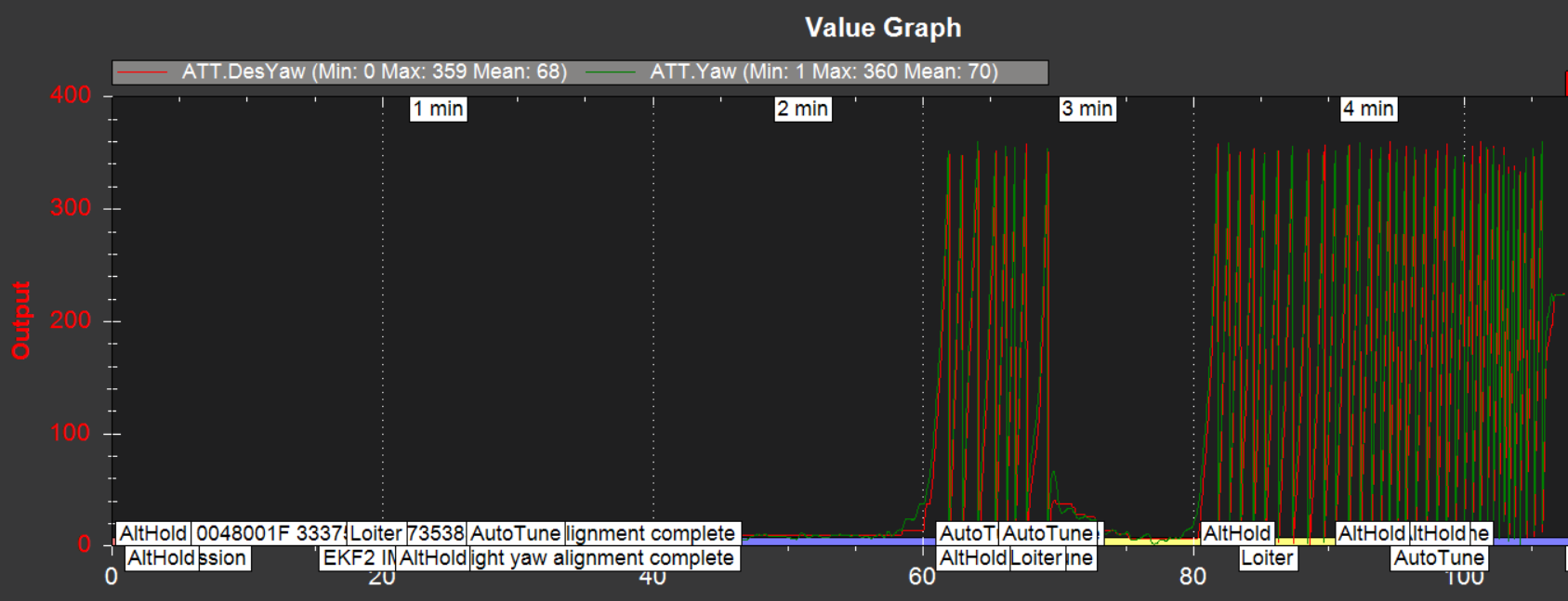
At the same time as the takeoff, the dron keeps rotating clockwise, and is not controlled.
The pilot did not drive Yaw.
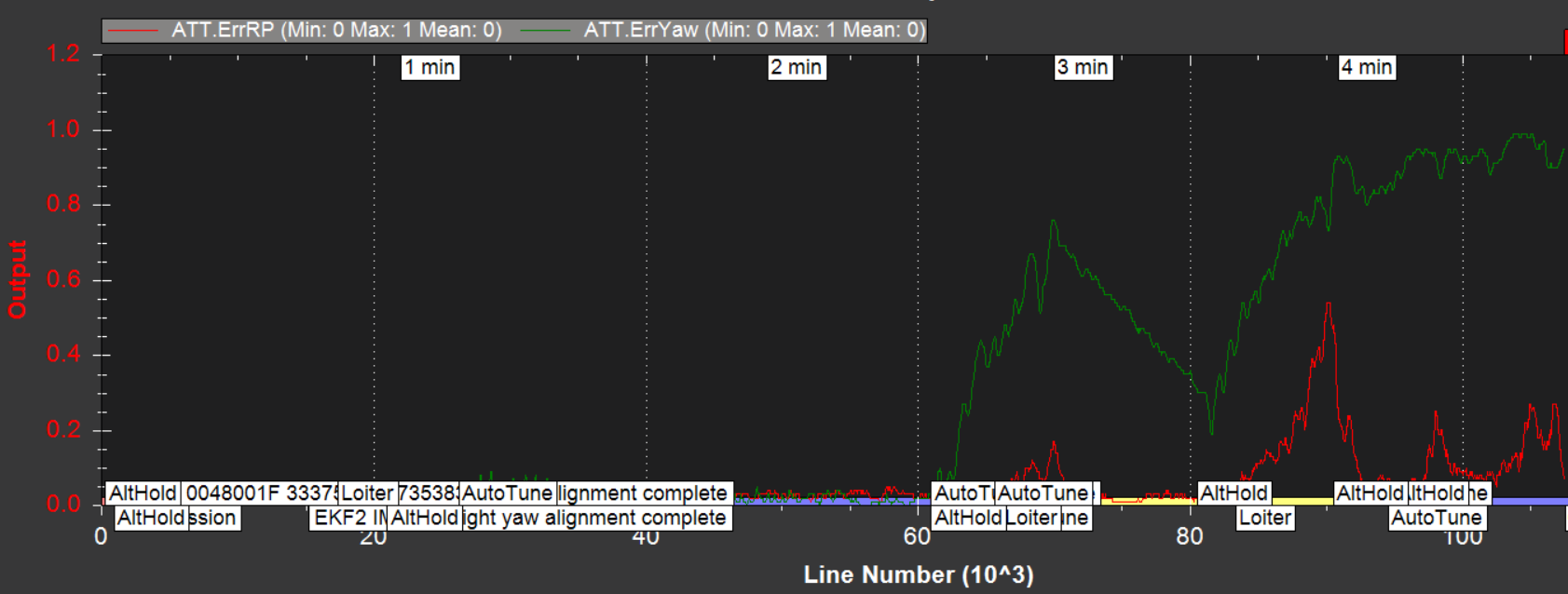
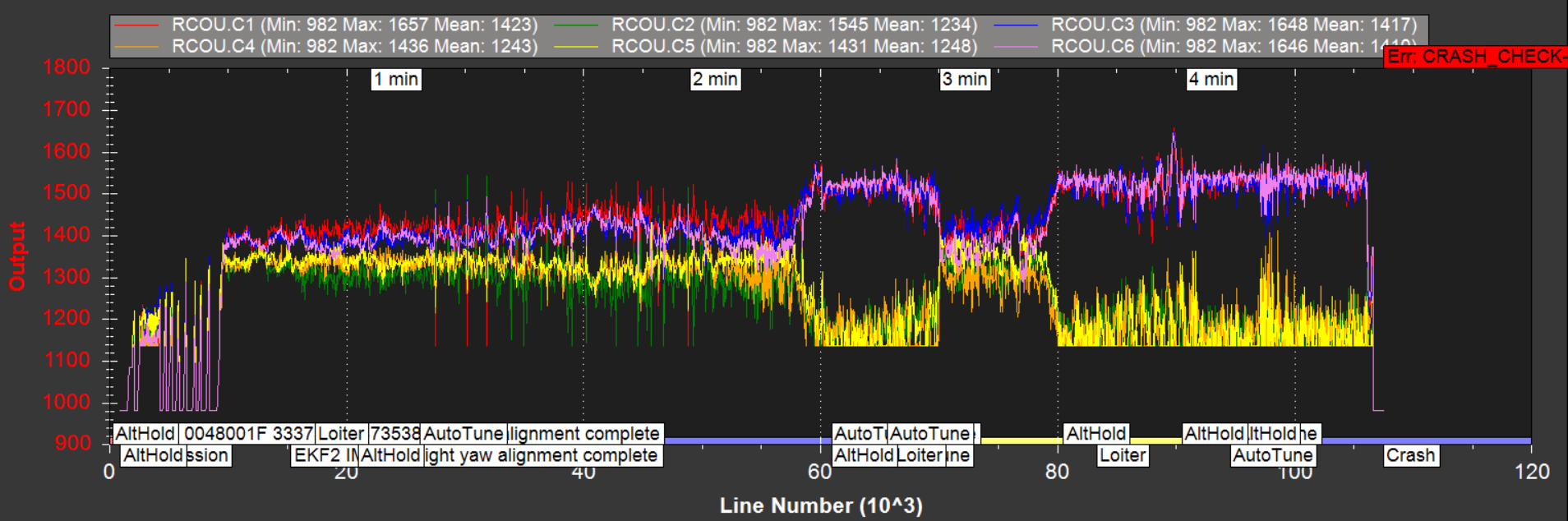
Please refer to Dataflash log.
I can not figure out the cause.
Things I’ve Tried So Far:
GPS replacement
Re-calibrated the compass
ESC calibration
Verify you have the Motor Order for you frame correct: http://ardupilot.org/copter/docs/connect-escs-and-motors.html , verify the motors are spinning in the proper directions, and verify the correct props are on the correct motors. You can verify motor directions using Mission Planner > Initial Setup > Optional Hardware > Motor Test. IMPORTANT NOTE: The motor testing sequence (A,B,C,D, E,F) DOES NOT FOLLOW MOTOR ORDER LAYOUT. For a Hex frame motor A is the RIGHT FRONT, B is Center Right, C is Rear Right and so on…
Once you have verified the motor order and motor directions are correct, WITH THE PROPS OFF, arm the motors, raise throttle a touch above idle and give a LEFT YAW command from the radio and note which motors speed up and which motors slow down. For a LEFT YAW, M1,M3, and M6 should SPEED UP and M2,M4, and M5 should SLOW DOWN. If the opposite happens you need to reverse the RUDDER channel (Typically Channel 4) in the radio.
I can tell you straight up this is NOT a compass issue. The compass is used for navigation, it does not control which way the aircraft is pointing.
Like I said previously, this is a classic torque yaw, and there are only a few things that will cause this. One is the motor order is wrong, another is the rudder input from the radio is wrong, and another is one or more motors may not be parallel with the frame.
From looking at your log it is obvious that the motors are being commanded to change in the wrong directions which only makes the aircraft yaw rate increase. So, either the throttle channel is reversed, or the motor order/direction of rotation is wrong.
So, what you need to to is run Motor Test with the props on and make a video. Make sure you have plenty of room and that there is nothing that will get picked up and blown around by the prop wash.
When you setup for the test you need to pick a speed that will make the motors spin. I use 10%. Then set the spin time to 10 seconds. Test each motor in sequence, starting with Motor A.