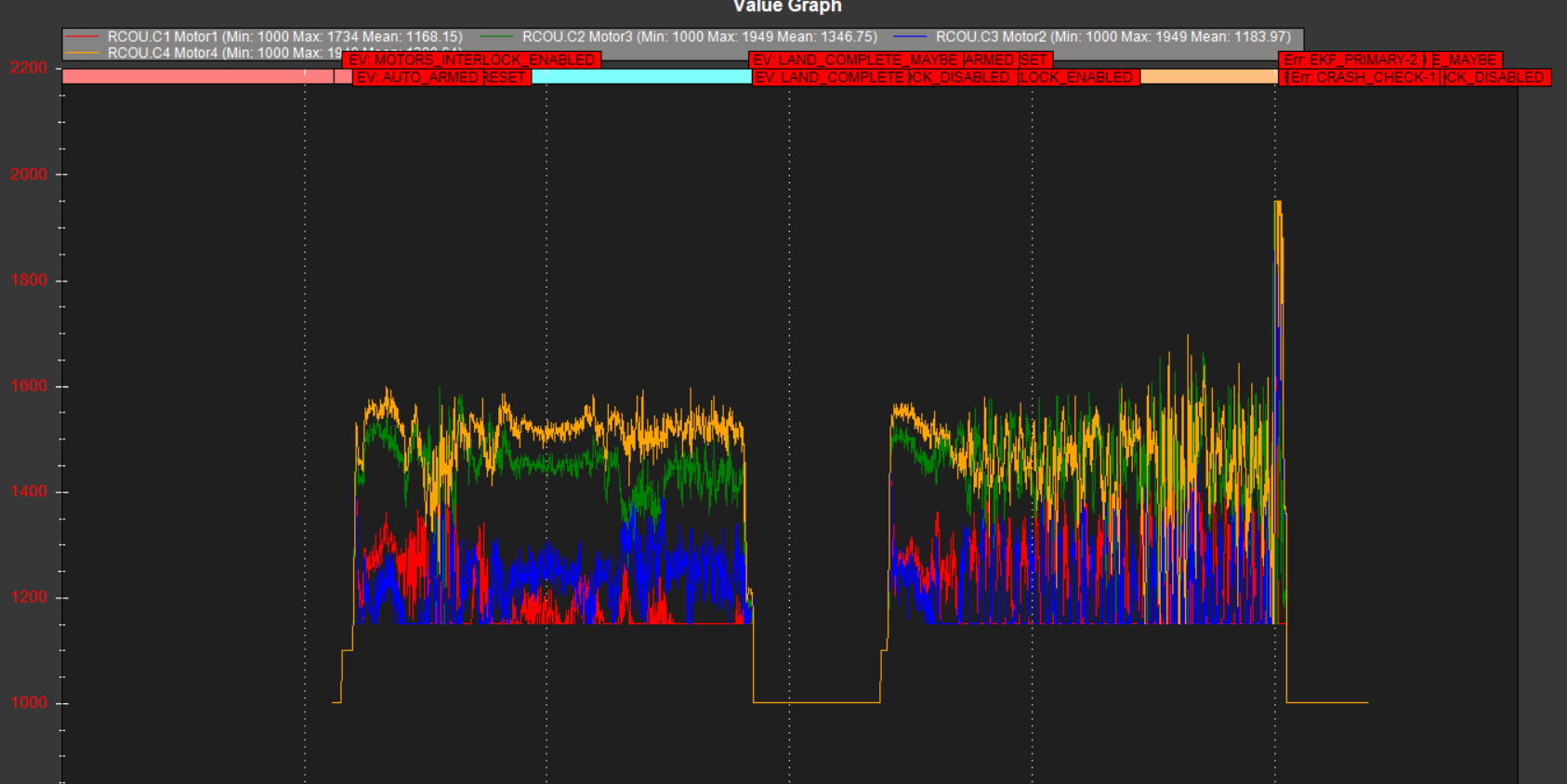
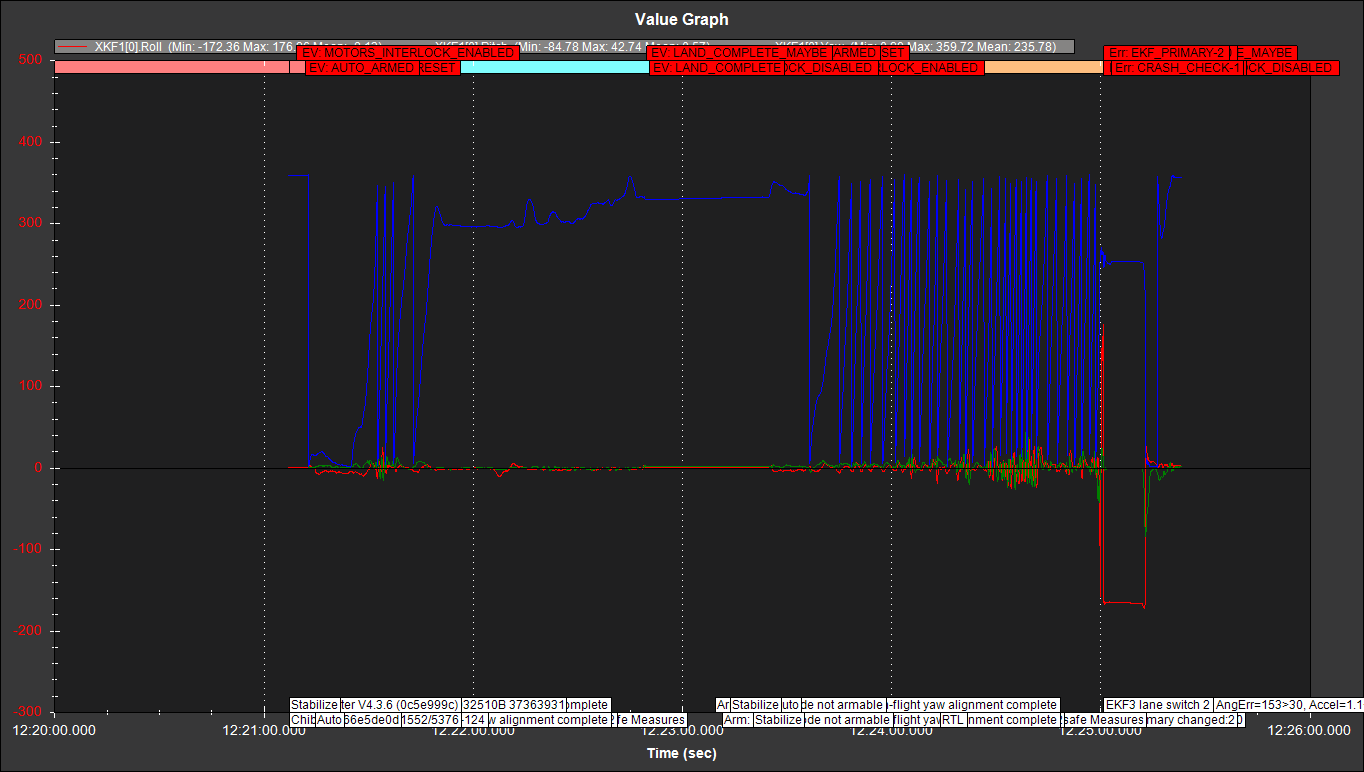
I’ve tried flying today, and have observed that the drone goes into uncontrollable yaw during waypoint mission. What I observe is that the motor aren’t properly aligned, and have made that change now. What I also observe is that the motors aren’t rotating at same rpm, which also leads to this.
Hi @amilcarlucas thanks for replying.
I have been reading some threads, but the issue seems different. Reading a few more now, this is helping me learn various causes to happen yaw imbalance. If I happen to solve I’ll post the solution myself here. Although I have made changes to my Quad, soft crash has made me more anxious in testing again.
Hi @dkemxr Thanks for the help, It’s flying good now, the problem was with both arms not being being vertical and compass calibration. My apologies for the delay, had to order parts and weather wasn’t great over the past 2 weeks, with these changes, drone is stable and the VibeZ has come down below 30.