I am testing a drone with Ardupilot on a Pixhawk. I’m using firmware version 3.5.5. When I am in auto-mode and send the takeoff command to the flight controller the drone goes up in the air like a rocket and can’t stop it unless hitting the arming switch. I’m attaching the flight log, please help me to figure out what is causing such behavior.
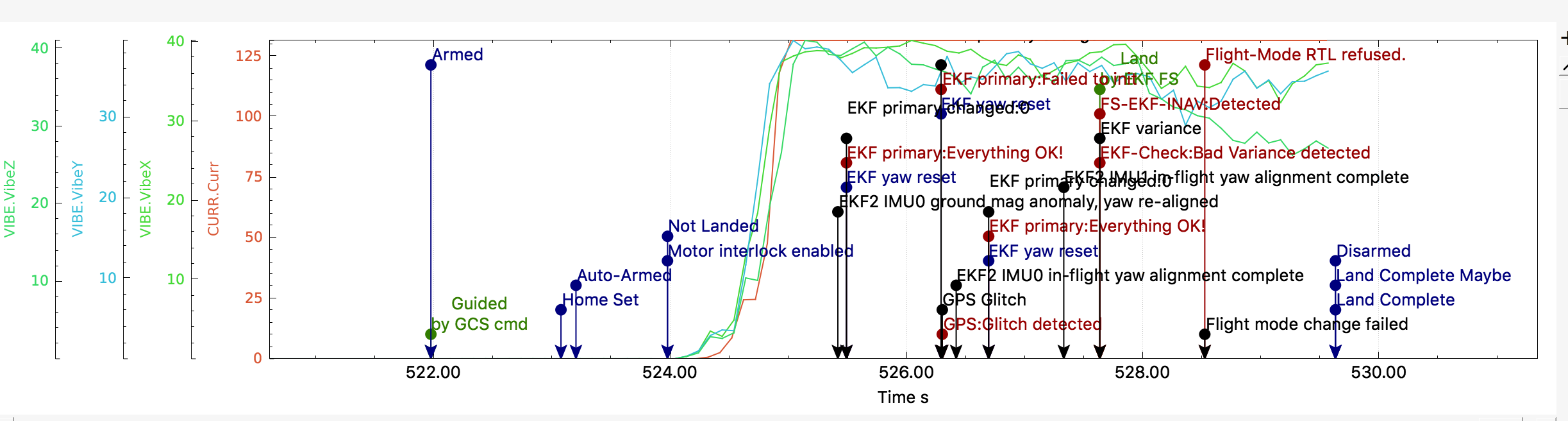
Well, those symptoms are usually linked with high vibrations… Just a quick check your log and vibrations are really high and the current shoots to 125A when all motors go to almost full throttle (1800+ pwm)… from there things start jumping all around like mag anomalies gps glitching, etc…so start by isolating the root cause of such high vibrations, and correct them.
Many thanks for your help. A bit of an insight of the incident:
The drone flies perfectly when in stabilize. This situation arises when we make the drone fly in auto mode using a companion computer (Nvidia Jetson). So, the vibrations level seems to be ok at least when in stabilize.
Do you think that by changing it to auto mode will increase the vibrations present in the system?
On Stabilize mode you are in control of throttle so you’re more “immune” to the behaviour you mention. As soon you “hand-over” the throttle control to the autopilot, those vibrations come and get your control all over the place.
I would test the vehicle on loiter and look at those vibrations.