I have a drone running ArduCopter firmare , and recentlly the drone sometimes unexpect continue climb and can no control . I have analysing the log myself ,
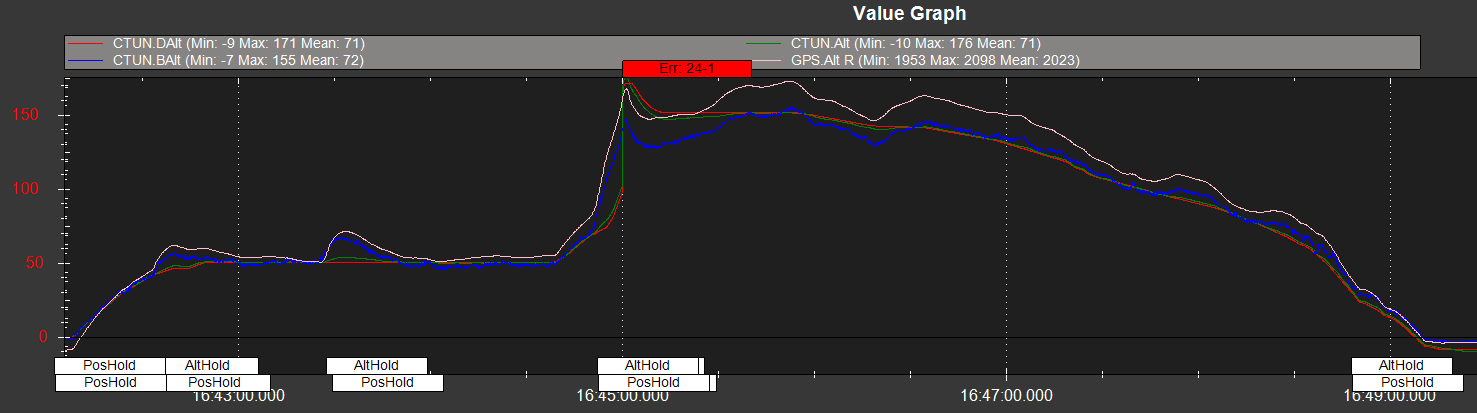
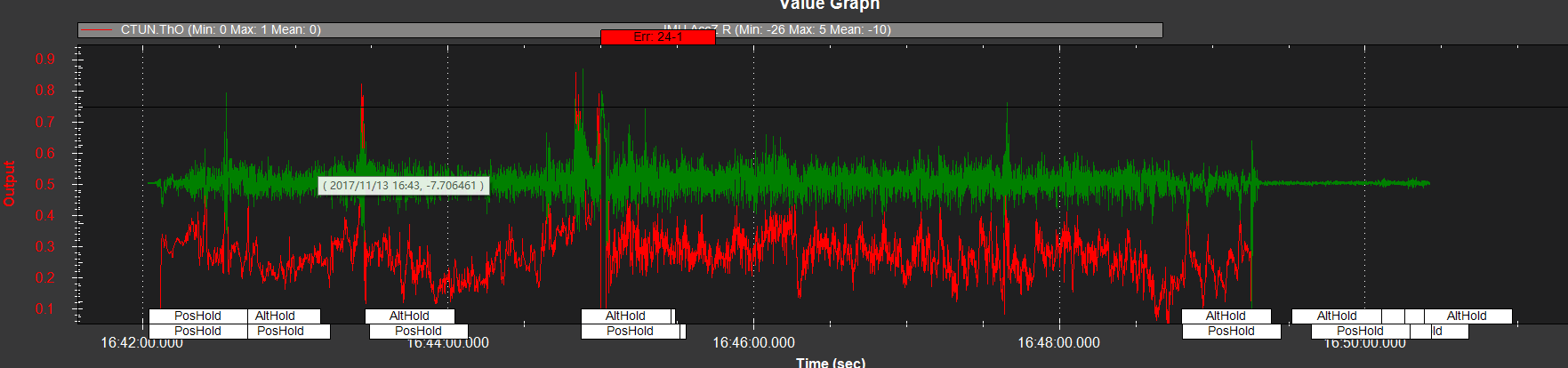
as you guys can see that .I think BAlt and GPS Alt is acutlly react the drone’s behavior . and the CTUN.ALT and CTUN.DALT are so wiered . I do think a drone can fly from 100 meter to 160 meter within 0.1 sec . So I am wondering if there are someting wrong with the CTUN.ALT which I think is the EKF estimate alt . And so here is the imu viabration image . everytime the z Axis go high is beacouse the THO suddenly go high . and when is hovering , the viabration is withing 0.2g . So I dont think is a viabration problem .
Here is my flight log . Any helps will be appreciate ! log