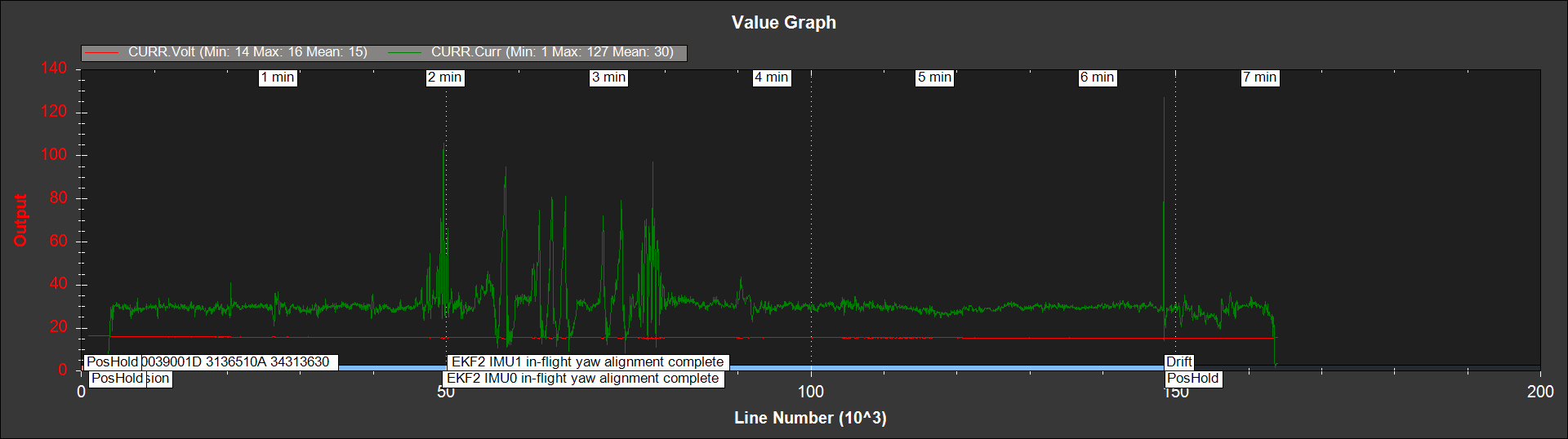
Was flying in position hold and it was hovering in place. Suddenly the copter jumped very briefly and resumed hovering like nothing happened. I landed immediately. The event was captured in the log by the volt/curr, but not by RCOUT, so I’m not sure if it was either too quick for the resolution of RCOUT logging or if somehow all 6 ESCs received a 100% throttle command that didn’t come from Pixhawk 2.1. Can anyone figure out why this occurred?
Just noticed RCIN3 jumped to ~90% throttle at the event… i’m using R9/R9M with Taranis X9D+. The receiver is sandwiched between 2 escs… can this cause receiver glitches?
That’s a glitch and a half.I can find evidence of it all over the place.Several radio channels,compasses,voltage and current,even the desired altitude.I’d probably suspect the RX as channels 3,5,6,8,and 12 all show the spike.Or a connection somewhere causing a surge.

I’m relocating the receiver. Shame because I loved where it was.
Check your receiver’s failsafe settings. If it briefly lost connection to the tx and it’s set to send PWM high on some channels, that might have caused this.
Turning the transmitter off, copter enters RTL.