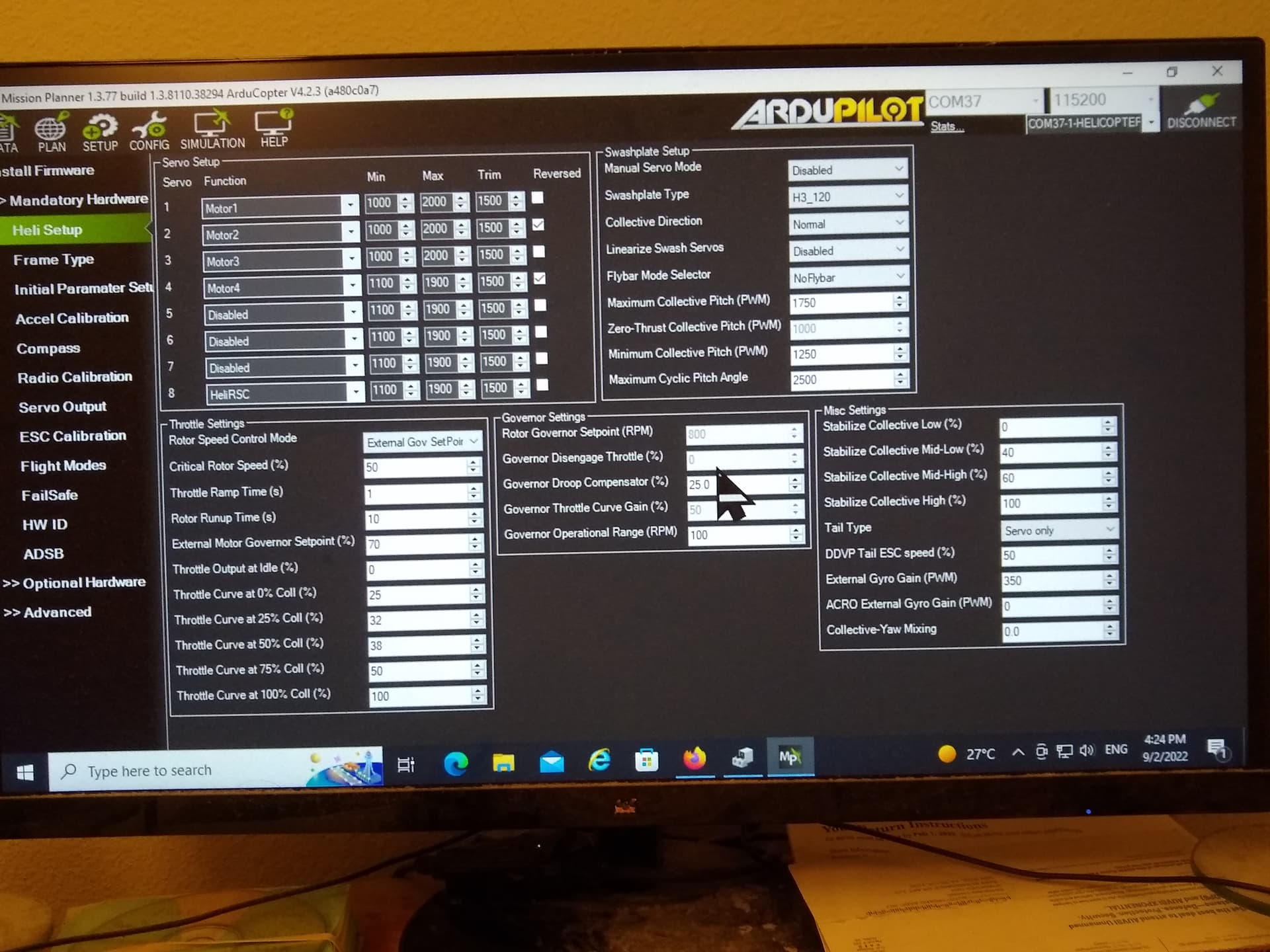
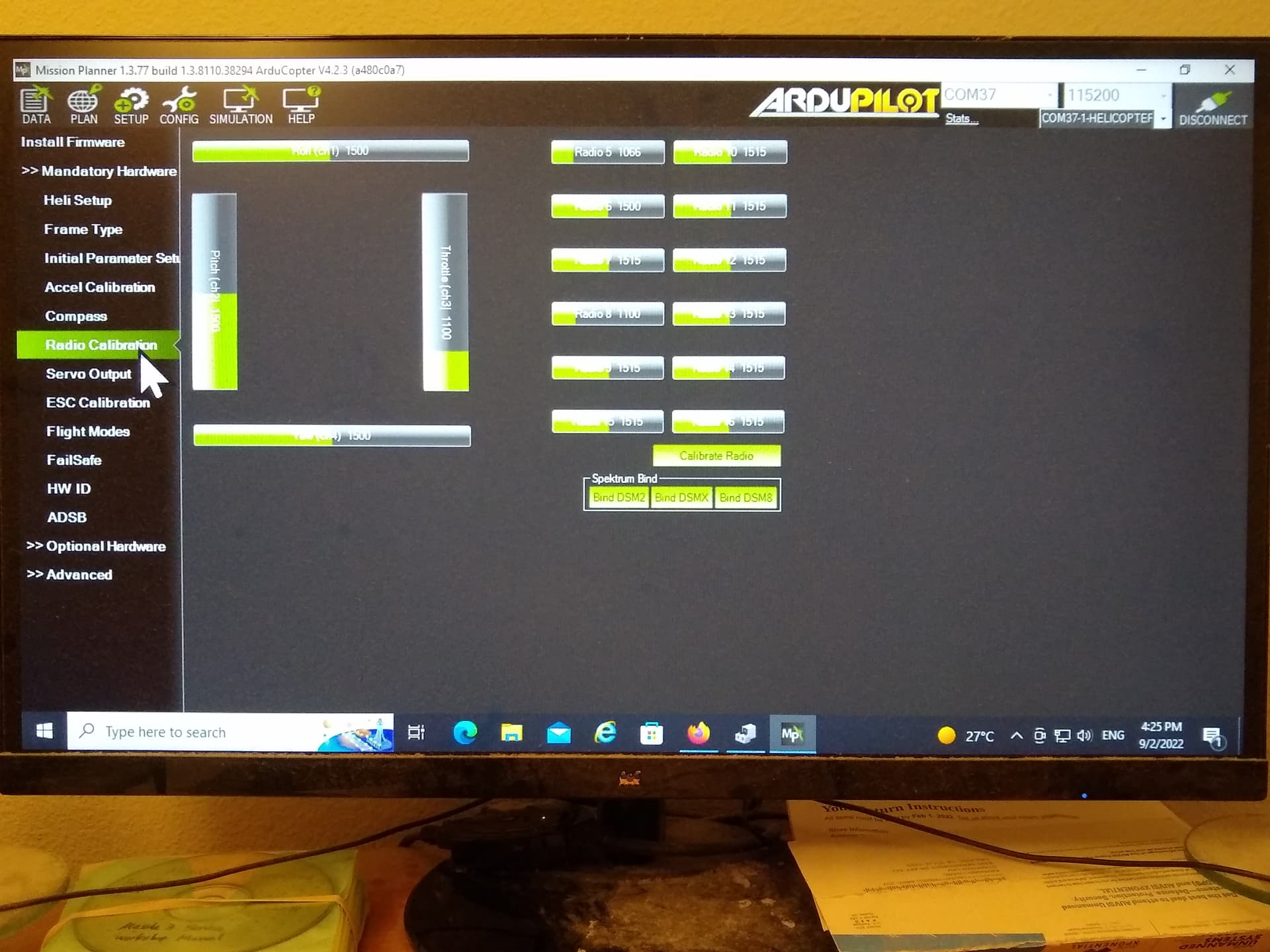
I tried to use my Corona R8SF (Futaba S-FHSS Compatible) receiver for my T-Rex 450 Heli. This Corona R8SF’s failsafe can not be set using “No Pulse” method, and the if the “Low Throttle” method is used to set failsafe, the lowest possible value of PWM I can set on channel 3 (throttle) is 1006 us. So I desided to make sure all channels fall on the PWM ranges [1100 us, 1900 us] with trims of 1500 us, and set throttle failsafe PWM value as 1010 us in Mission Planner. I calibrated the Radio in Mission Planner to make sure all channels are in that [1100, 1900] ranges. I then tried to enter the same PWM ranges [1100, 1900] for all channels in “Heli Setup”, “Servo Output” tabs in Mission Planner. I also manually calibrated my ESC by connecting it directly to Ch3 in the receiver. After I entered these PWM ranges [1100 us, 1900 us] with trims of 1500 us, I did a “Write Parameters”. However, very soon, I found out in most channels’, these PWM ranges [1100, 1900] reverted back to [1000, 2000] in “Heli Setup” and “Servo Output” tabs.
Could someone please tell me why my [1100, 1900] PWM values cannot stay, and if I ignore the inconsistencies of the PWM ranges in “Radio Calibration” and “Heli Setup” and “Servo Output” tabs, will there be any problems later?
The servo output is not what you need to look at if you are setting the transmitter ranges. Those are set on the RCX parameters. Go to config page and then on the left choose full parameter tree. Expand the RC group. That’s where you will change them and that is where they are changed when you perform a radio calibration.
Thanks for answers. I checked the Full Parameter List, and found out my RCx_Min are around 1100, RCx_MAX are around 1900, (where x is from 1 to 4). SERVO8_MIN is around 1100, Servo8_MAX is around 1900. Ther are consistent of my Radio Calibration. My question is should I ignore all the servo output ranges [1000, 2000] shown in “Heli Setup” and “Servo Output” Tabs for servos 1, 2, and 3? I tried to make then consistent with my Radio Calibration [1100, 1900], but they won’t stay and revert back to [1000, 2000]. Will these inconsistencies cause any problems later?
I am confused on what should be done on my OpenTX transmitter before the Radio Calibration in Mission Planner. I saw your video on the Swashplate Leveling, and knew that in the 1st step, you need to select “Pass Through” and move the transmitter collective stick so that the Servo1 to servo3’s outputs almost become 1500 PWM. My question is that should I set the EPA and subtrims on my Transmitter’s output channels so that the PWM for (min, center, max) almost equal to (1100, 1500, 1900) before the Radio Calibration steps? Without doing so, I cannot obtain the 1500 PWM on Servo Outputs of 1500 PWM on servo1 to servo3. If I do the EPA and subtrims on transmitter to make the PWM values almost equal to (1100, 1500, 1900), will these PWM compatible with the range of (1000, 1500, 2000) (unchangeable by me) in the Servo Output page in Mission Planner?