Maybe you misunderstood my circuit. The mosfet is a n channel but i have it in a inverter circuit with another transistor because the mosfet needs 5v. Thus i cant add a pullup wirhout adding another transistor.
So how do I invert it? Change something in the code?
And what does setting the pwm type to brushed?
And what are these reversible settings?
And how can I change the file?
And do I need ChibiOS for this or can I just change it in the ardupilot git repository?
Another thing: There are 7 RCOutput.cpp files in the repository. Which one should I edit?
Hello,
I’m having a similar issue all I want is for my servo to move CCW instead of CW. Is this something I can do easily? SERVOx_REVERSED to 1 doesn’t seem to work and using SERVOx_MAX as 1000 and SERVOx_MIN as 2000 does not work.
SERVOx_REVERSED does reverse the servo motion. If it doesn’t seem to work, then something else is wrong. Make sure you’re looking at the right channel.
Hello Emanuele,
I was not able to do it. I’m sorry. There must be an issue with one of the new Copter releases. I unfortunately currently don’t have time to look into.
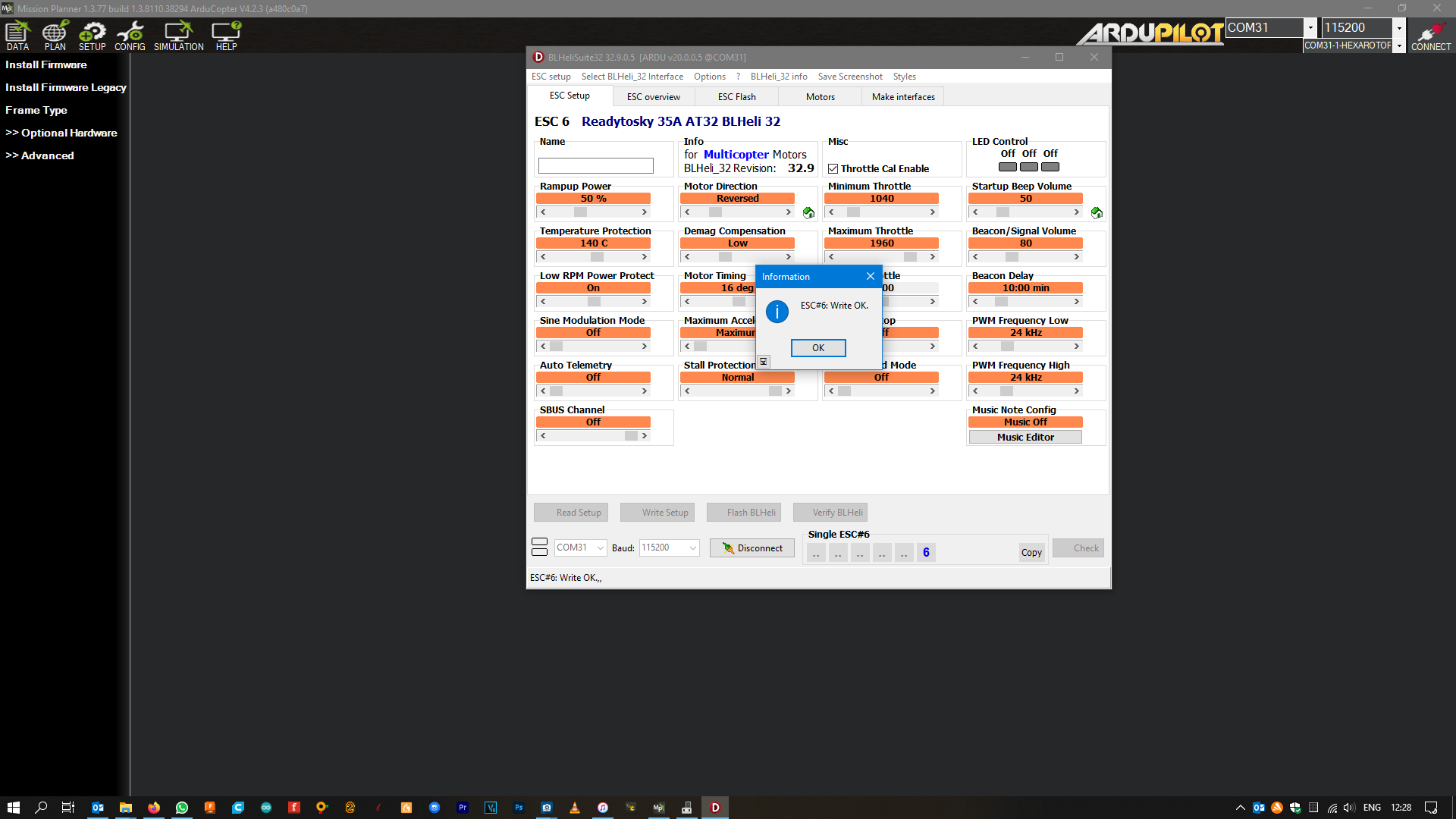
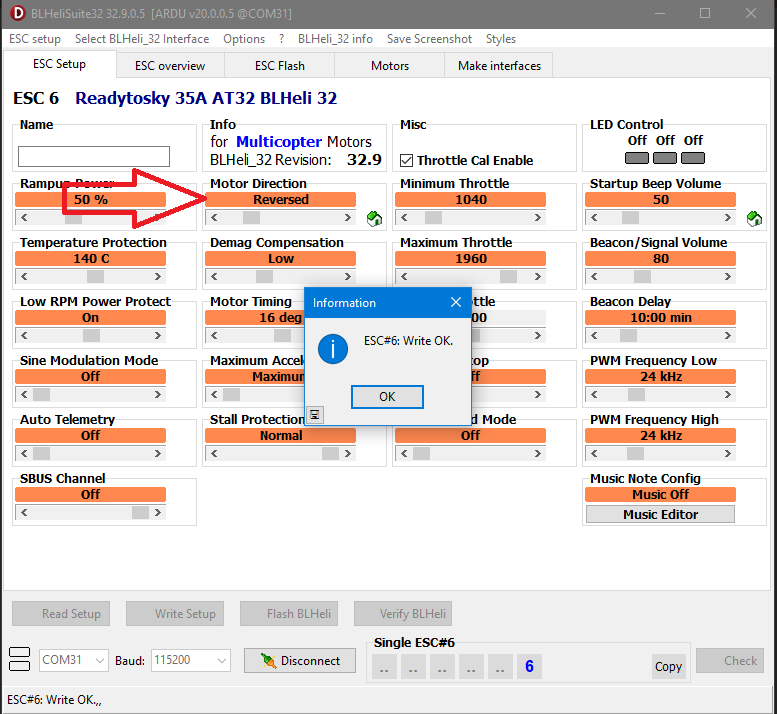
The Reverse function in Mission Planner is fake, and only misleads reasonable people. Like the support tips on this topic, it seems that the “next generation” doesn’t know what it’s real flight and never been in field …
In fact everything simple, reverse motors as both all and each separately, can be configured in BLHeli / BLHeliSuite32 Configurator, if you don’t ancient ESCs of course …
Reversing a servo output in Ardupilot means instead of 2000PWM being “high” and 1000PWM being “low” , now 2000 is “low” and 1000 is “high”
It doesnt mean reverse a motor or ESC direction.
If you have BHELI ESCs you can even reverse the direction without using the BLHELI32 Suite, just use this parameter:
SERVO_BLH_RVMASK,xxx