I’m stuck with an error and I’m asking for your help…
TL;DR : Cannot change to “AUTO” mode and don’t know where to find relevant info about the error I get, “Flight mode change failed”
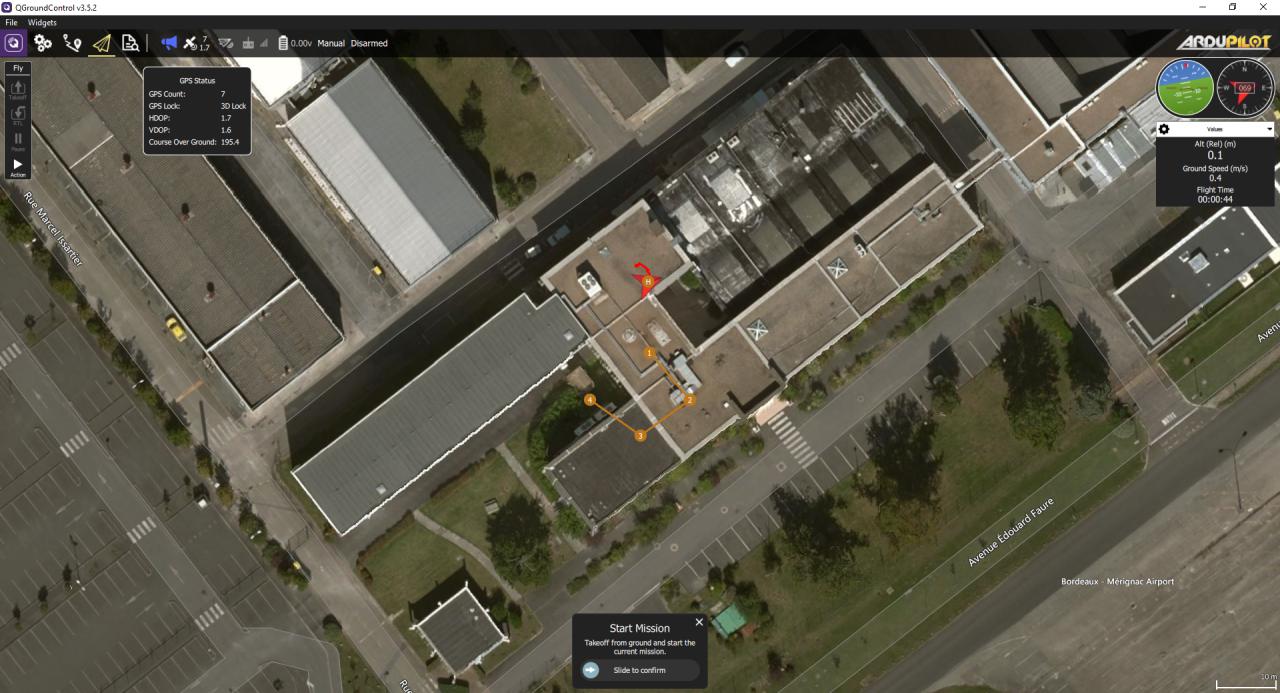
I want to control a boat using QGroundControl to do autonomous missions using GPS.
I have configured my autopilot (ArduRover 3.4) as a boat (Frame_class=BOAT) and made several adjustement to make it work with my controller (Taranis x9d plus). Everything seems alright in “manual” mode but I cannot make it to change mode to “auto” or “guided” (from QGC). I keep getting the message “Flight mode change failed” but without any other information.
Moreover, I didn’t manage to get any relevant log using the console and I’m stuck trying to get some information pointing out the reason why I cannot switch to “auto” mode…
I hope I made myself clear enough and I will gladly provide more information that could help understand my problem
I have to admit I have little to no experience in ArduRover although I succesfully configured several UAVs with the pixhawk firmware…
Thanks in advance for your attention !
More information :
ArduRover V3.4.2 (318a941d)
PX4: b535f974 NuttX: 1472b16cD
PX4v2 00480041 34355112 343036391
QGroundControl v3.5.2
GPS > 3DFix ok ( > 10 sat locked)
Mission with 4 WP set & successfully uploaded
Hello Michael,
Thanks for your answer, yes I do have GPS 3D Fix when I try to switch to auto mode.
I will do some tests today again, maybe I’ll have more information then.
You really need to provide a log file from the FC.
What board are you using?
Just having a 3D fix does not necessarily mean it is ready to go into guided mode as the velocities may be still too high.
If you try to arm in a guided mode what message comes up on the GCS?
Hello Mike,
Thank you for your answer.
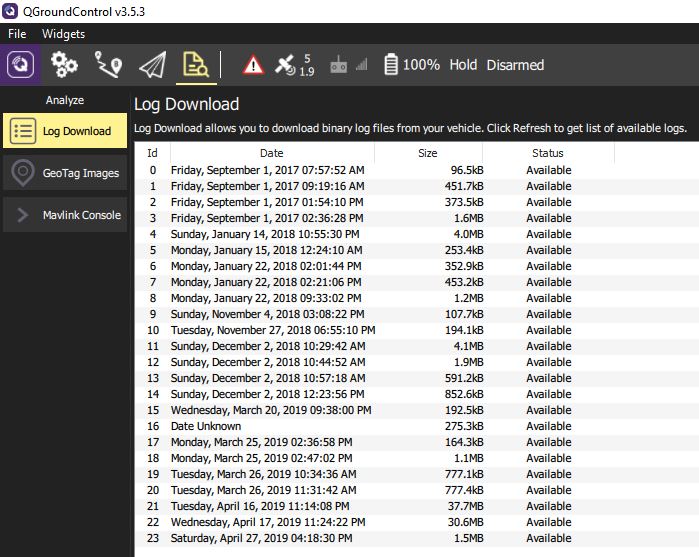
I really wish I could provide a log file… as I said in my first message, I can’t get my hand on anything that looks like a log file… That’s why I’ll be grateful if you could pinpoint their location to me…
I’m using a Dropix, from Drotek, which is based on the Pixhawk FMUv2.
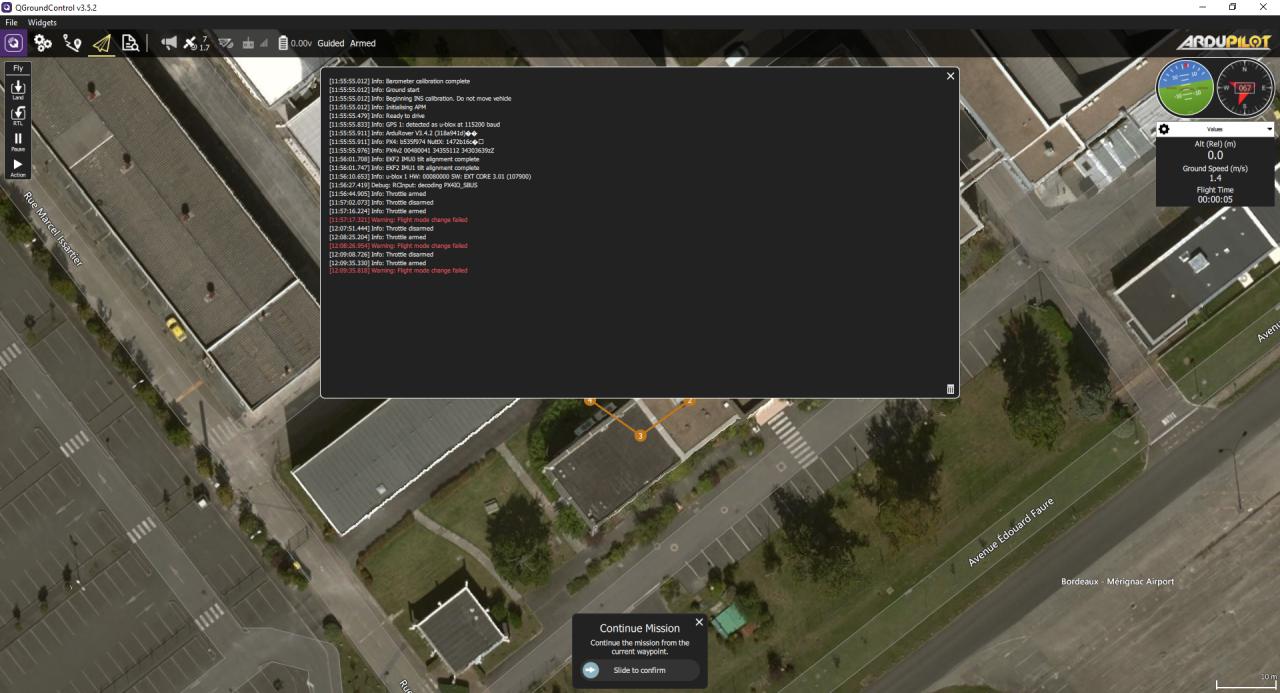
Here are screens of what happens when I try to switch to “guided” mode :
The Wiki entries for log files starts here
We are interested in the ‘Dataflash Logs’
The onscreen messages don’t give much illumination as to the cause.
Maybe the answer is in the log?
I finally managed to extract the log, guess looking for “logs dropix” on Google didn’t help as much as “logs ardupilot”… I feel stupid but thanks Dave and Mike, that’s the info I was looking for.
I guess that was my problem, even though when I first tried I had a count of 10 sats… We tested it yesterday outside and we finally managed to make it switch to “AUTO” mode successfully.
Now is the time for tweaking and tuning to improve the way it behaves.
Thanks to all of you for your answers !