It doesn’t look like I hit the throttle stick by accident.
I had a Emergency Motor Stop configured - so that took care of the climb. And as bonus, I got some really good destructive testing on this frame. (remarkably little damage)
I’ve never had this exact thing happen before. Perhaps it was some sort of “glitch.”
If anyone has time to look it over, I’d appreciate any comments or suggestions.
In what state of tune is this craft? There are some PID changes from default and not others. And, has it learned the Hover throttle value? Can’t tell from this log but is .389 correct?
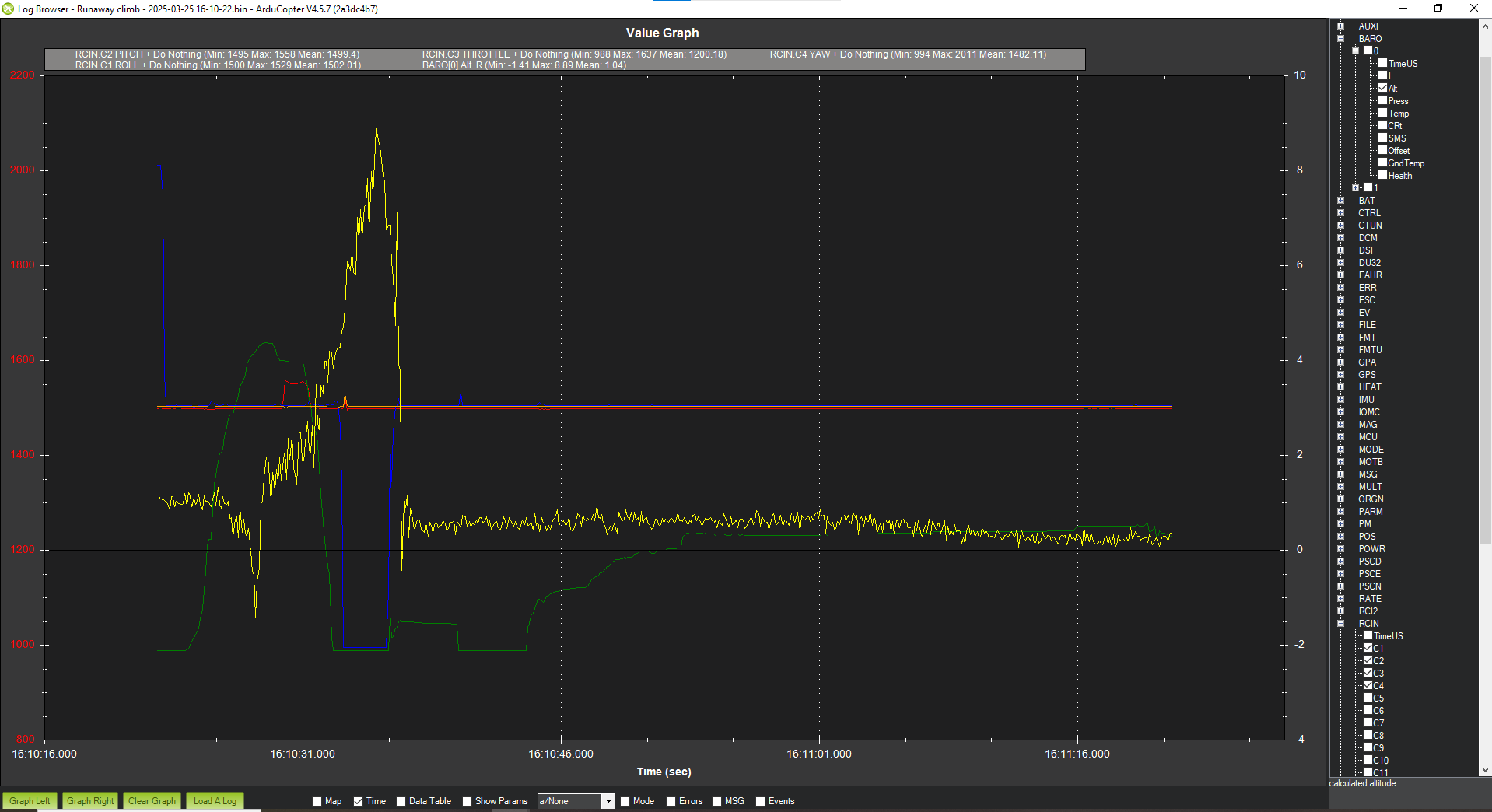
And, go ahead and check the RC outputs and see what you find.
This is the copter with the 2216 motors I’ve been working on.
This copter has the same motors and props as the Hexsoon EDU-450, and is very close in dimensions and weight. So I decided to apply the Hexsoon EDU-450 parameters from the available parameter source on the CONFIG tab.
Of course de-selected all the parameters that weren’t performance related.
But you may have hit the nail on the head. The MOT_THST_HOVER value for this quad has been around 0.2. So using the EDU-450’s 0.389 might be the culprit.
I pulled the throttle all the way down and the copter still seemed to climb. I used the motor stop function because of my trees. Maybe had it been able to keep climbing for a while it would have settled down.
Had I scanned the new parameters more closely for reasonableness, I might have caught other things that were obviously unreasonable.
I guess what I find pretty interesting between the EDU-450’s MOT_THST_HOVER of .389 and my copter’s value of 0.2 is how light and efficient my copter is by comparison.