Hi guys,
Hear my sad story. We assembled by ourselves a very huge hexacopter with pretty much the following setup:
- Pixhawk 2,1 running arducopter 3.4.6
- Here + GNSS external compass
- Two Multistar 6S 16.000 mAh connected in serie to have 12 S
- An attopilot current monitor 180A
- Range Finder Lite 40m
- etc… (if additional information may help, just ask me)
We flew before this little monster in Stabilize, AltHold, and Loiter. Our Loiter was beautiful, after running an Autotune in three axes. I’ve never built a Multirrotor so stable. We even run a Failsafe test, with tank full of water discharging all the time, and everything goes well.
But it was the time to test the dron in AUTO. We configure a very simple mission with four waypoints:
- Takeoff 3m
- WP1 to WP2: speed of 3 m/s and altitude of 3m and start spraying
- WP2 to WP3: goes from 3m to 4m and stop spraying
- WP3 to WP4: speed of 3m/s and altitude of 4m and start spraying
- RTL not spraying
Everything goes well the whole mission. Just some ERROR COMPASS VARIANCE (my nightmare), but the copter never goes crazy. When the copter swicth to RTL, it increase the altitude until 10 m (I forgot the fact that by default the copter has a predefined altitude when starting the RTL). After that, the copter reach the point when it was supposed to start the descend and… guess what? it just disconnected in the air !! So that was the thing. We suffered a fall from 10 m. Not to much damage, so we were lucky. Just a couple of carbon fiber rod broken.
We are not so expert exploring logs, so I have attached both logs, dataflash and telemetry, to see if someone can see something weird.
https://drive.google.com/open?id=0B25NS1ReeTJbSlFFdjhFUzFJdWs
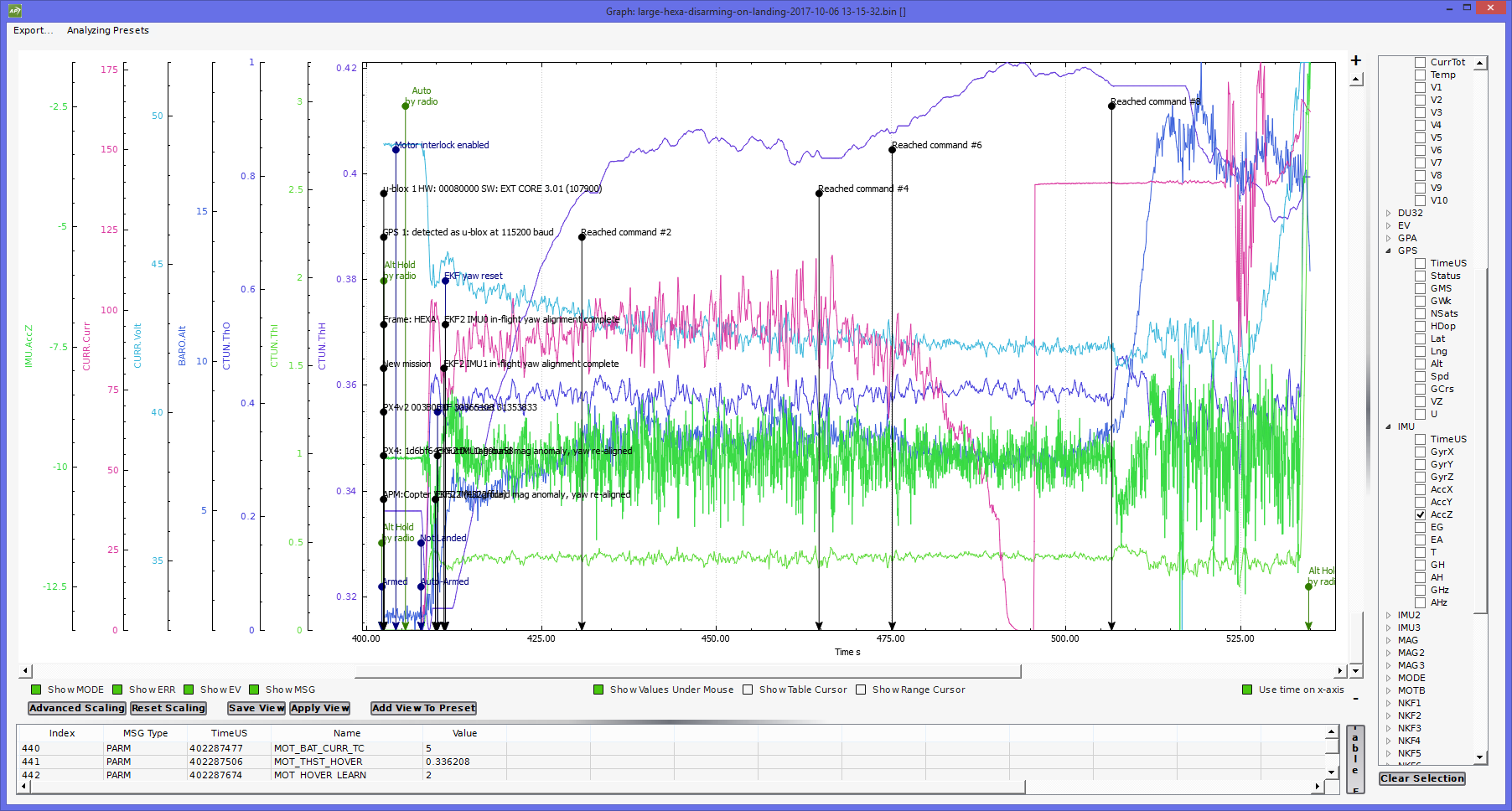
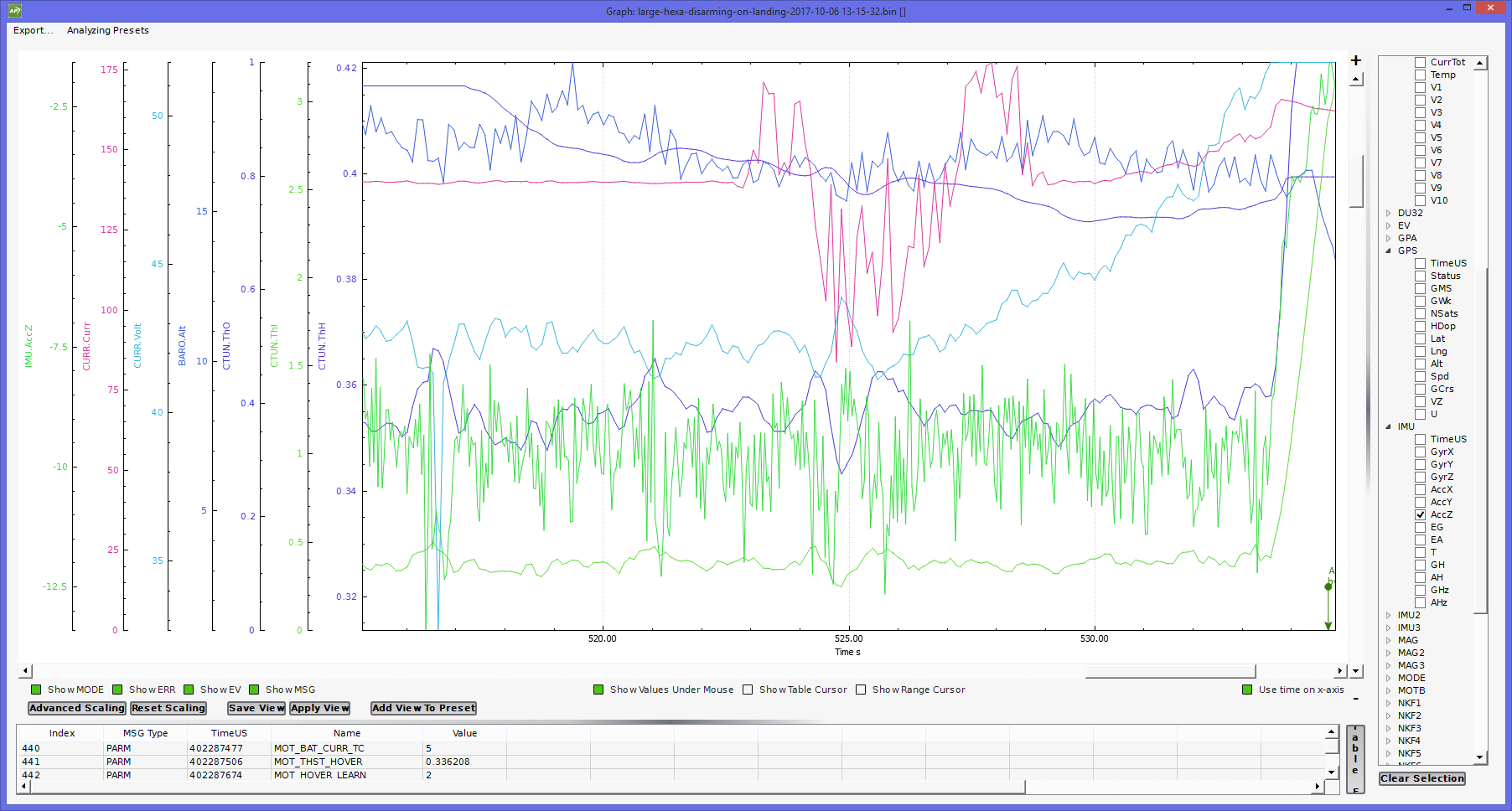
The only think that I can see is a sudden increase in the vibration on z axis. My hypothesis is that because the tank was still with water, when the descend started, the water wobbles, the copter tried to be stable, the vibration increased, and that breaks some connection and accident…
But to be honest, I am not fully convinced with this hypothesis. Anyone, after checking the logs, can see anything we are missing?
Thanks,
JM