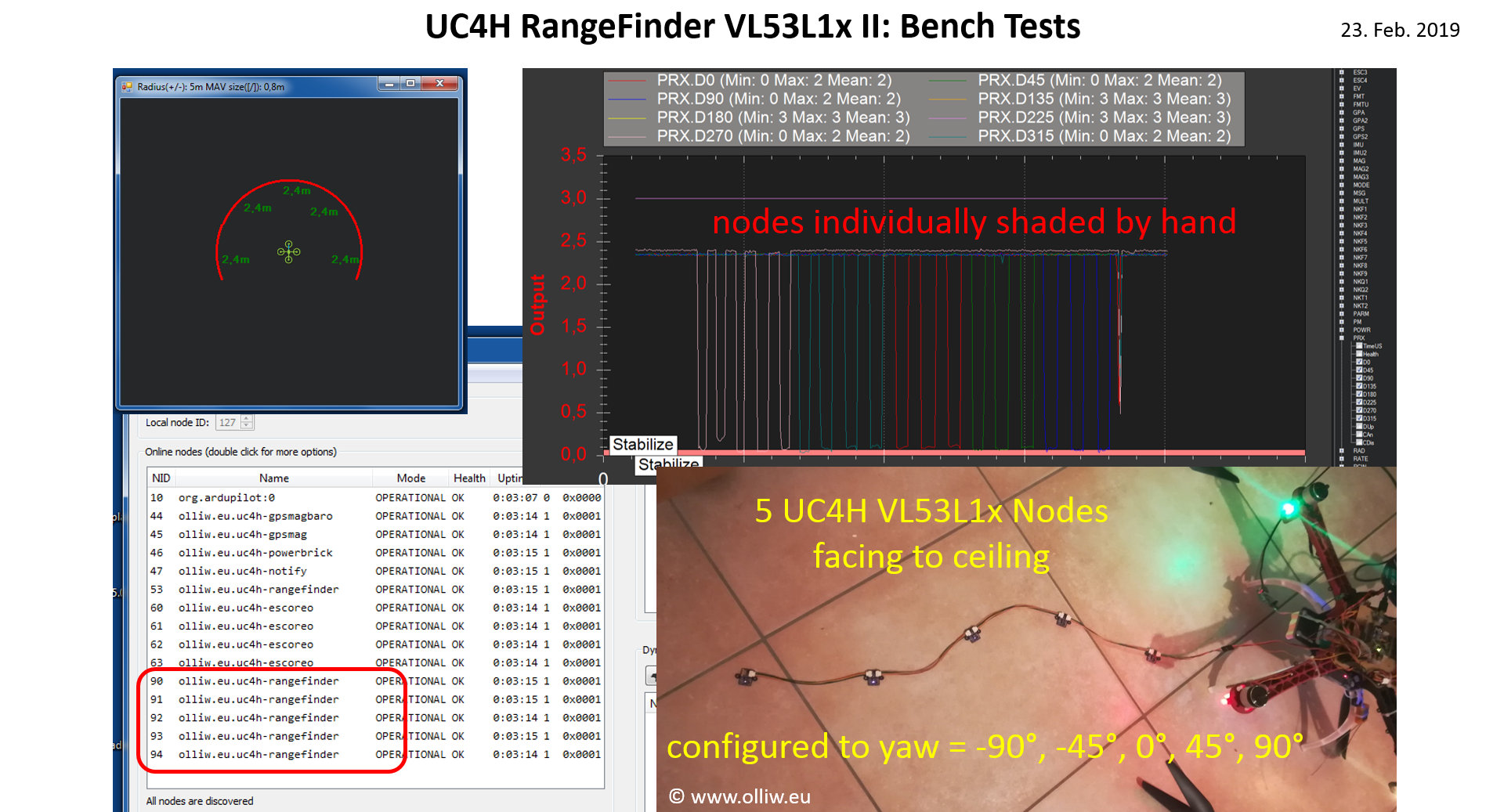
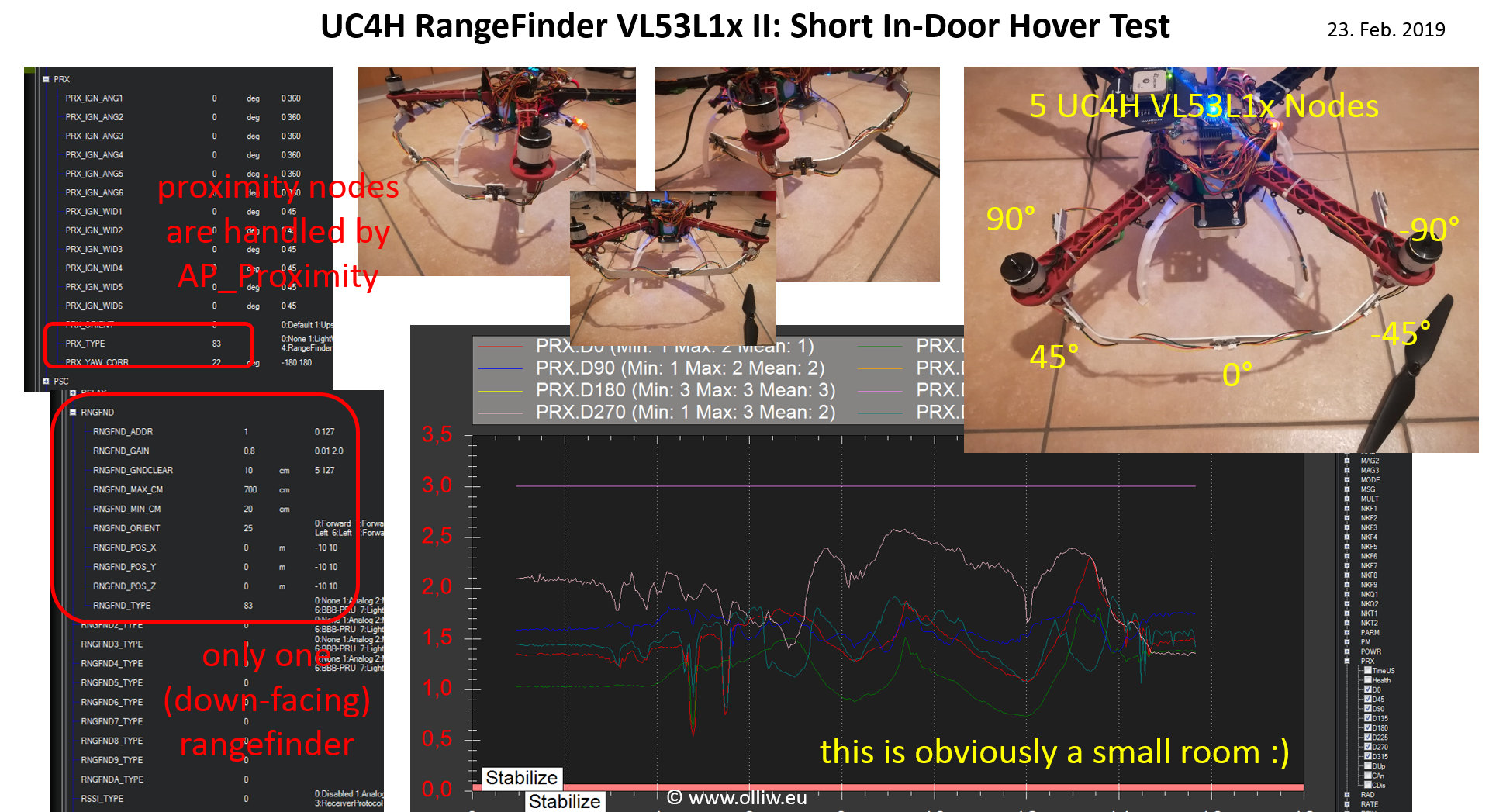
The UC4H RangeFinder VL53L1x PCBs have arrived me, and they really work great. It’s one of the very rare instances where I’m happy with a PCB design on the first shot. This is actually somewhat surprising since I’ve modified the scheme, in order to get nodes as small as possible. Anyway, I’ve build 5 of them and gave them a first test. I already had adapted BetaCopter before to handle up to 10 rangefinders, so this was a quick thing to do. Quite differently to how ArduPilot works, in BetaCopter the proximity rangefinders are handled directly by the AP_Proximity class. This makes configuration much easier, and is also much more natural for UAVCAN proximity sensors (IMHO), and is probably also more efficient (I have the sensors running at 50 Hz, so this might be relevant).
The CAN bus/UAVCAN concept is really shining here. Just compare this build to all the tweaking people had to do in order to get more rangefinders to work, and in addition they had to pay in terms of significantly lower data rates.
I also did a short in-door hover, but I do not really have a suitable room for flying a 450 copter. So, it’s a bit scary. Obviously, the goal will be to use the rangefinders for collision avoidance, but this will need quite some work, so is really more a projection into the future.
As indicated before, the goal will be 10 rangefinders; my vision is actually what I will call „UC4H Spider Eyes“. Right now there are „just“ 6 rangefinders, 5 proximity sensors, and a down facing one. I didn’t wanted to go with 10 right away. I first wanted to test these VL53L1 before I’m further investing money into this, especially since there seem to be very few reports on practical experience.
In fact, my tests so far seem to indicate some weaknesses. The range is given as up to 4 m. This appears to be correct, however above ca. 3 m the signal becomes really very noisy. I would say that the usable range is something like 2.5-3 m (which still is great, IMHO). Furthermore, these things really need filters (the above PCB had been designed with this in mind  ). The disastrous out-door performance I did show already below. However, I also had to disable the OreoLEDs on my copter since they spoofed their signal. Ok, the ±45° VL53L1x sensors are installed quite close to the OreoLEDs, nevertheless, given that these sensors use IR light I wouldn’t have expected such a sensitivity to them (do the WS2128B emit also in the IR range? I guess I need to check that LOL). Anyways, my feeling is that these little beasts are great, but need a bit of caretaking
). The disastrous out-door performance I did show already below. However, I also had to disable the OreoLEDs on my copter since they spoofed their signal. Ok, the ±45° VL53L1x sensors are installed quite close to the OreoLEDs, nevertheless, given that these sensors use IR light I wouldn’t have expected such a sensitivity to them (do the WS2128B emit also in the IR range? I guess I need to check that LOL). Anyways, my feeling is that these little beasts are great, but need a bit of caretaking