Hey @olliw42@ppoirier
I’m trying to get Magnetometer working using UC4H on Bluepill. Every time I try to calibrate, the calibration fails. Sometimes the calibration gets completed, But I get “Bad compass health” message.
Looking for suggestions.
ok… what kind of gps and compass?
just consider that you can use a different binary… the one you are using its out of date.
You can compile a new update version with Ubuntu…
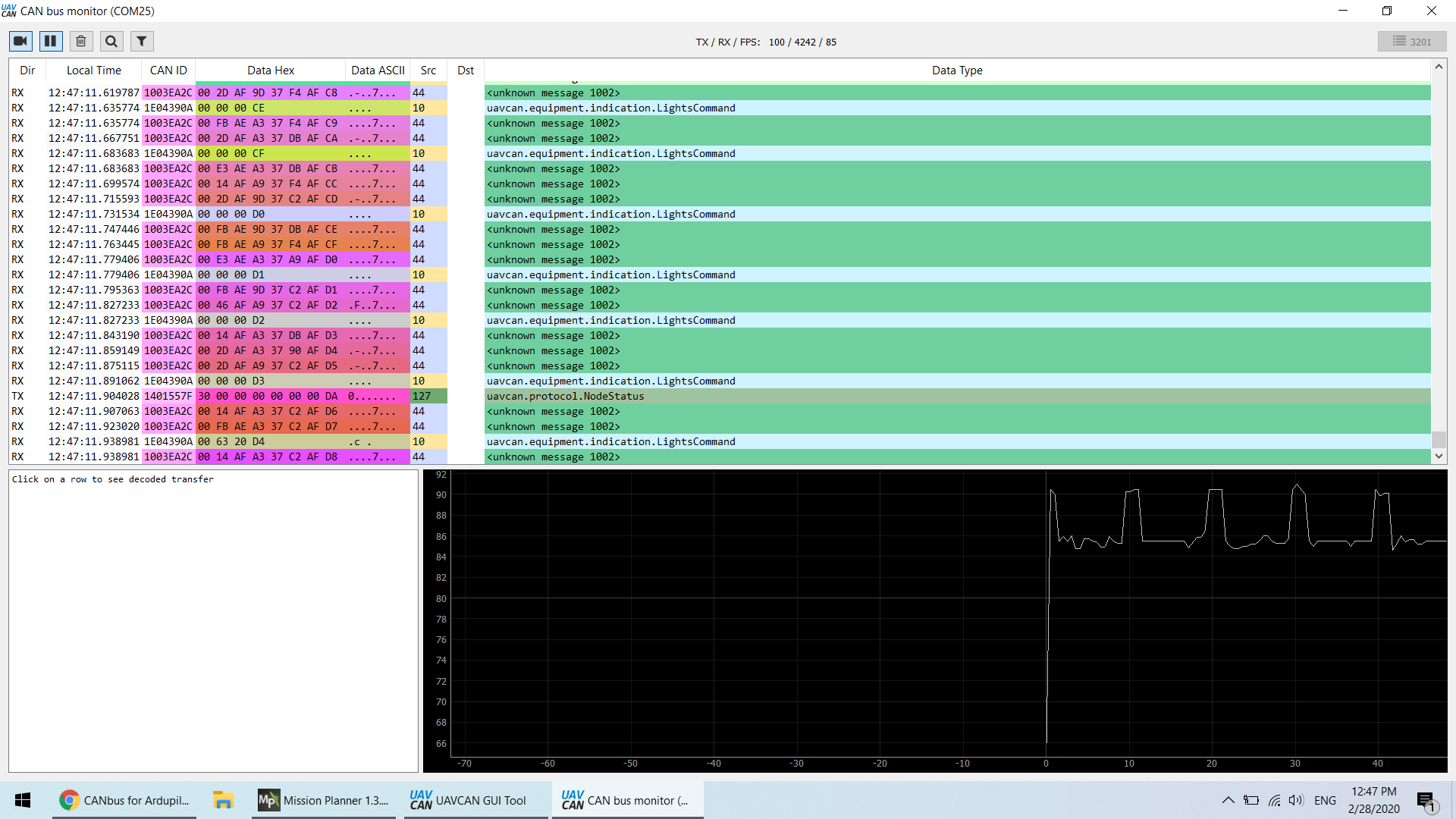
In order to be able to decode the UAVCAN messages on the CAN bus, this tool must know about the definitions of the UAVCAN messages. The UC4H-specific uavcan.olliw.uc4h.GenericBatteryInfo, uavcan.olliw.uc4h.Notify, and uavcan.olliw.uc4h.Distance messages used by the UC4H PowerBrick, UC4H Notifier, and UC4H RangeFinder nodes, as well as the STorM32 UAVCAN messages, are not part of the standard set. They thus need to be made aware to the tool by copying the message definition files to a particular folder: Move the folder „olliw“ and it’s subfolders with the .uavcan dsdl definition files to the folder „C:\Program Files (x86)\UAVCAN\UAVCAN GUI Tool\uavcan\dsdl_files\uavcan\“. Now, after a restart, the UAVCAN GUI tool should show the new messages in e.g. the bus monitor, and not display „unknown“. http://www.olliw.eu/2017/uavcan-for-hobbyists/