http://www.olliw.eu/2018/uavcan-for-hobbyists-blog/
I really don’t understand why not just everyone is crying for CAN.
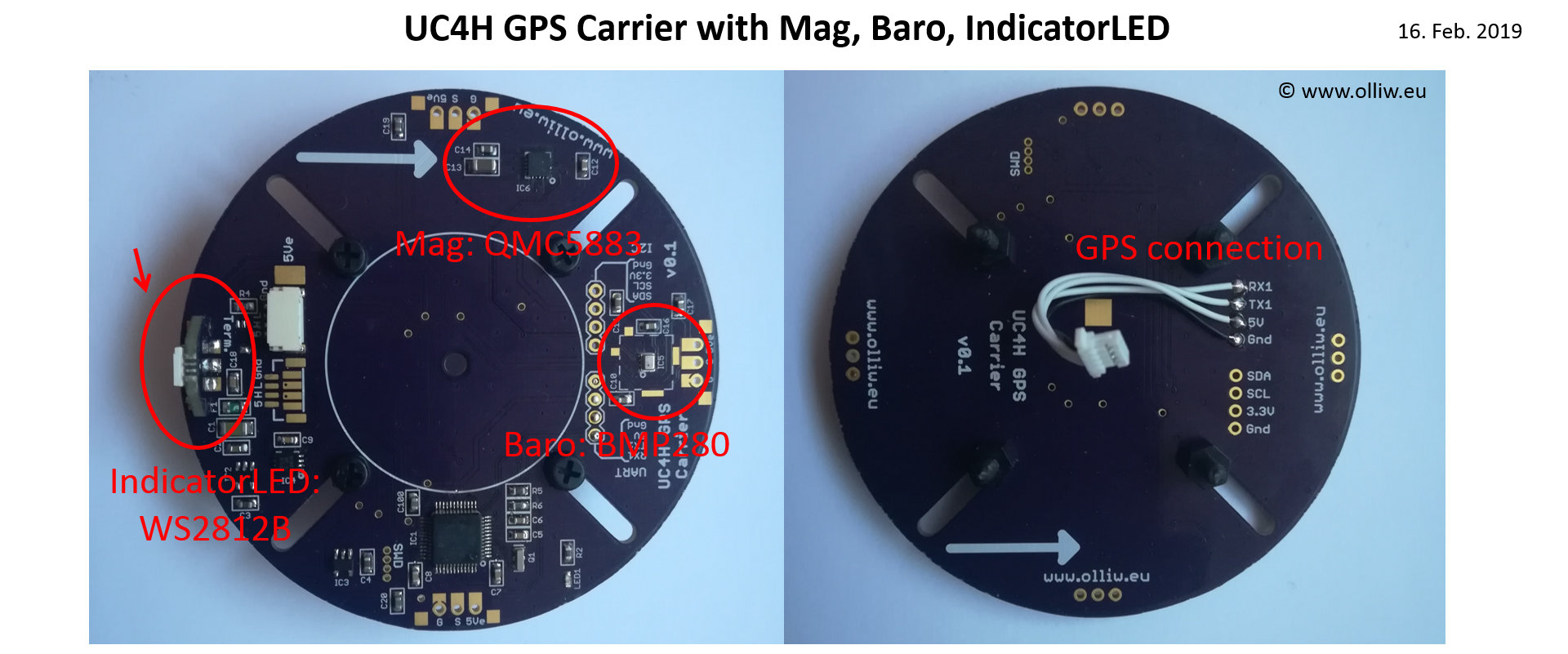
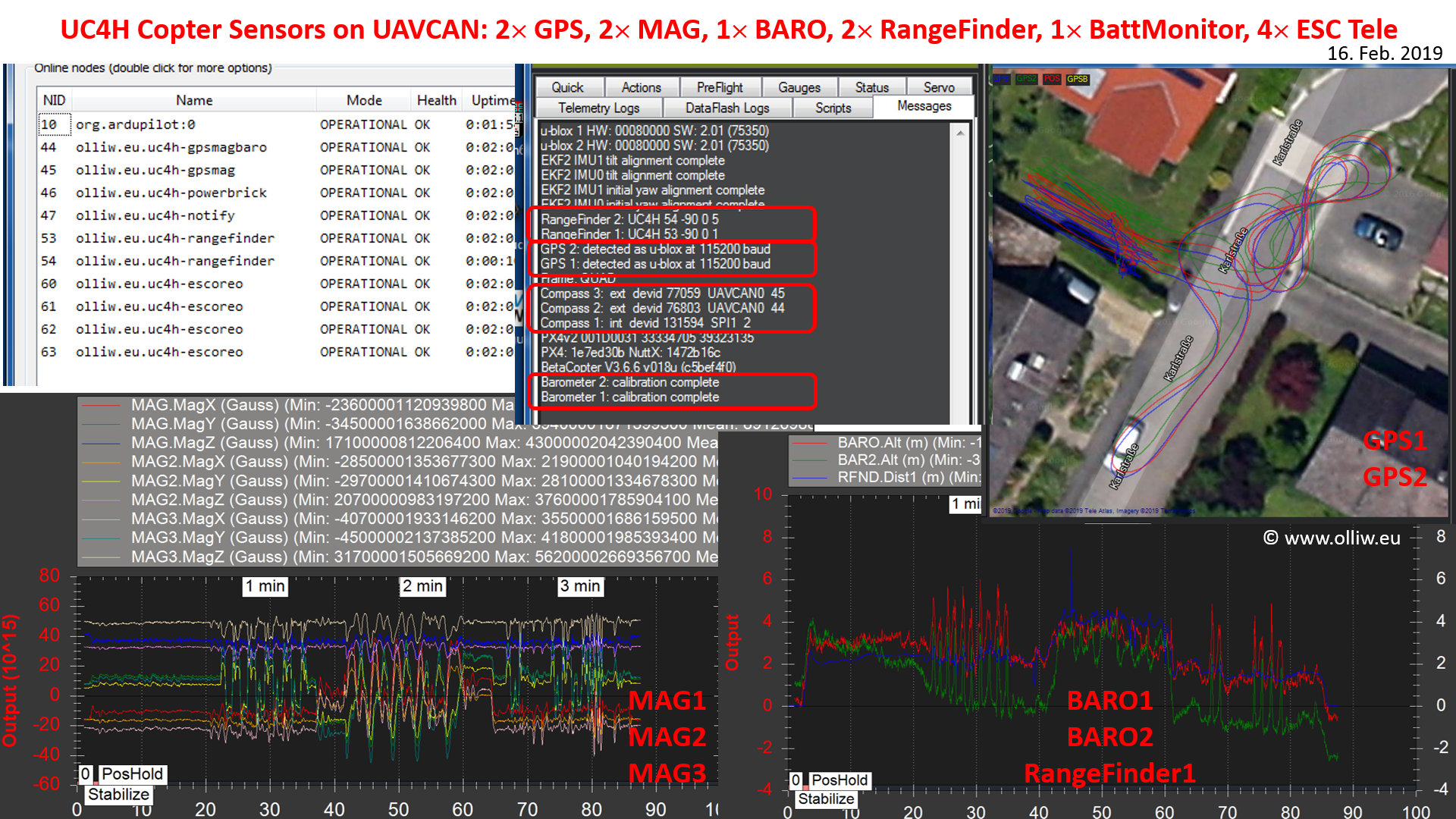
I got my UC4H GPS-Mag-Baro Carrier boards, and quickly assembled two of them. And they just work as I wanted them to work. Fantastic.
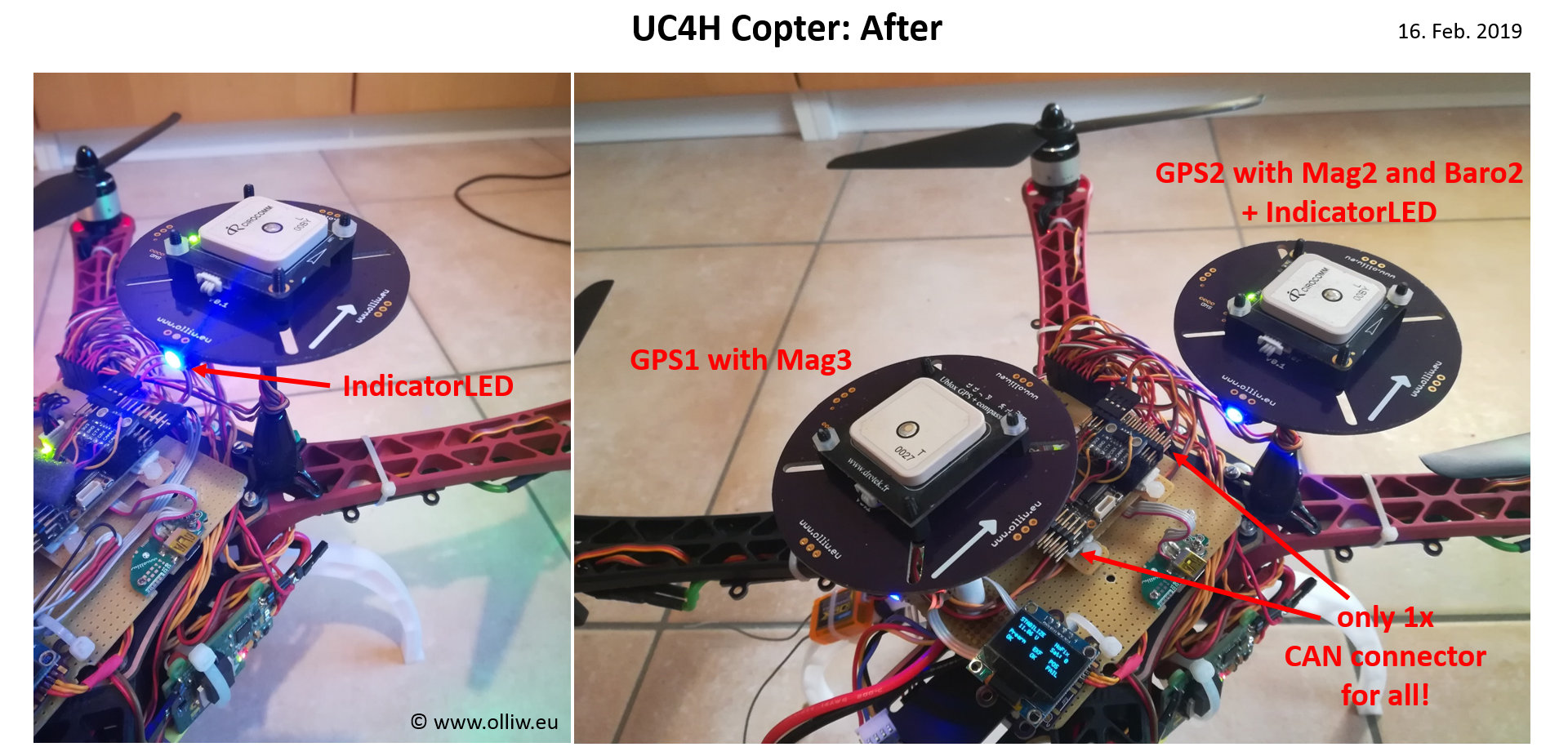
This is really what I wanted to have for a long while, since it makes my copter so much cleaner. It also solves three nasty points: First, the magnetometer on the 1st GPS module started to misbehave in cold weather some while ago. So it needed a replacement. Now it is replaced by the magnetometer on the UC4H GPS Carrier board this GPS is mounted to. Second, the 2nd GPS module I kept so far on serial (except for tests), since I didn’t had enough general-purpose UC4H boards, and also because I didn’t wanted to have yet another one on my copter. So, now this GPS is also on a UC4H GPS carrier. Finally, the magnetometer on this 2nd GPS module I didn’t use since I didn’t wanted any I2C cables anymore, but it made me sad to not use an available external magnetometer. Now, this magnetometer became available as 3rd MAG with no effort.
And of course, the integrated IndicatorLED is also just a great feature.
And of course, it is just great that there is now only one (= 1 !!!) connector left which is going to the flight controller, namely the CAN bus connector. It hardly can be simpler.
However, as always, everything great can be further improved, which in this case means that I further worked on the layout of the UC4H GPS Carrier, i.e., there will be a version v0.2 
The one main thing which is missing now, is a UC4H flight controller.