Hexor
(Hexor)
1
Hi,
I try to setup my SIMPLERTK2B board and the Pixhawk 6C (Rover 4.2.3) but still have “NO GPS” message.
SimpleRTK board are wired to the pixhawk via the JST connector in the “GPS2” port of PX6C
In PX6C I set :
GPS_AUTO_CONFIG 1
GPS_AUTO_SWITCH 1
GPS_PRIMARY 1
GPS_TYPE 1
GPS_TYPE2 1
SERIAL4_BAUD 115
SERIAL4_OPTIONS 0
SERIAL4_PROTOCOL 5
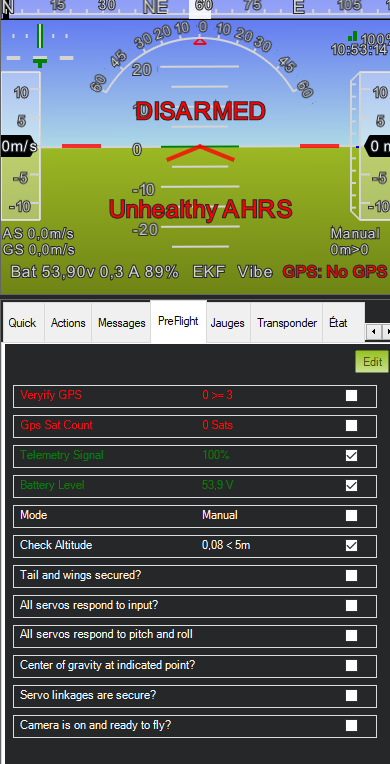
Why only “GPS : No GPS” appear on mission planer ? (GPS2 is missing)
My setup seem to be ok ?
Connect it to the GPS1 input port instead
Hexor
(Hexor)
3
It’s not possible to connect it to GPS2 port ?
Because the standard cable are not compatible with the GPS1 connector.
→ SimpleRTK2B connector are 6 pin JST and PX6C GPS2 connector, too.
I do not think you can use only gps2
Hexor
(Hexor)
5
Ok I will try to connect to GPS1 and if it’s working, try to GPS2.
I will post result here 
Hexor
(Hexor)
6
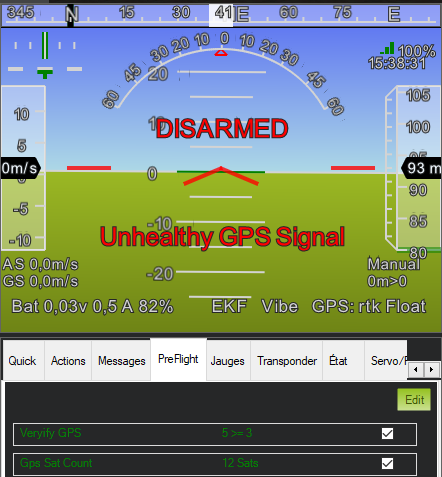
I try to wire on the GPS1 port, but “GPS: No GPS” appear again. (but RTK appear on GPS2)
GPS seem to not working as we can see in preflight.
Hexor
(Hexor)
7
I do some others test same result.
I connect the GPS on the “GPS 1” port (the big one) why on the screen “RTK Floa” appear in front of "GPS 2 " ??
You have something wrong in the parameters
Hexor
(Hexor)
9
I reset all parameters.
And config GPS as this :
| GPS_AUTO_CONFIG |
1 |
| GPS_AUTO_SWITCH |
1 |
| GPS_BLEND_MASK |
5 |
| GPS_BLEND_TC |
10 |
| GPS_CAN_NODEID1 |
0 |
| GPS_CAN_NODEID2 |
0 |
| GPS_COM_PORT |
1 |
| GPS_COM_PORT2 |
1 |
| GPS_DELAY_MS |
0 |
| GPS_DELAY_MS2 |
0 |
| GPS_DRV_OPTIONS |
0 |
| GPS_GNSS_MODE |
0 |
| GPS_GNSS_MODE2 |
0 |
| GPS_INJECT_TO |
127 |
| GPS_MB1_TYPE |
0 |
| GPS_MB2_TYPE |
0 |
| GPS_MIN_DGPS |
100 |
| GPS_MIN_ELEV |
-100 |
| GPS_NAVFILTER |
8 |
| GPS_POS1_X |
0 |
| GPS_POS1_Y |
0 |
| GPS_POS1_Z |
0 |
| GPS_POS2_X |
0 |
| GPS_POS2_Y |
0 |
| GPS_POS2_Z |
0 |
| GPS_PRIMARY |
0 |
| GPS_RATE_MS |
200 |
| GPS_RATE_MS2 |
200 |
| GPS_RAW_DATA |
0 |
| GPS_SAVE_CFG |
2 |
| GPS_SBAS_MODE |
2 |
| GPS_SBP_LOGMASK |
-256 |
| GPS_TYPE |
5 |
| GPS_TYPE2 |
1 |
| GPS1_CAN_OVRIDE |
0 |
| GPS2_CAN_OVRIDE |
0 |
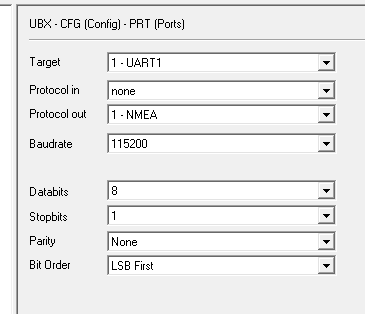
Someone say me it’s better to use UBX protocol instead of NMEA. But if I try to send UXB data from the GPS, not working, I get “no gps” message.
Why I get “unhealthy GPS Signal” ? what is the condition to not have this warning ?
Hexor
(Hexor)
10
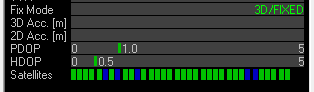
I made some others tests : outside, clear sky view.
Hardware : GPS RTK : SimpleRTK2B + This antenna https://www.ardusimple.com/product/survey-gnss-multiband-antenna/
Same issue : “Unhealthy GPS signal”.
It’s an issue with my u-center config ?
tkoivuro
(tkoivuro)
11
There is a bug in ardupilot where the software does not look for GPS from GPS2 port if GPS1 port does not have working GPS connected to it.
Here is workaround:
- Set protocol of GPS1 port (SERIAL3 in pixhawk) to ANYTHING but GPS. Rangefinder for example.
- Set GPS_TYPE2 to match your GPS
- Set BRD_BOOT_DELAY to 3000
And now serial connected GPS works in GPS2 port even if GPS1 is not connected.
We are flying with UAVCAN gps as GPS1 and F9P connected to GPS2 port as 2nd GPS and this works just fine.
Hexor
(Hexor)
12
Thanks for the tip I will try this later.
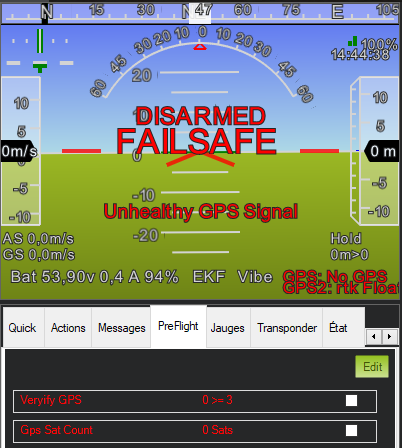
For now I connected the F9P on the GPS1 port, so I got “GPS : RTK xxx”, Maps is OK, but still have “Unhealthy GPS signal”
What conditions make “unhealthy gps signal” for Ardu Rover ?
tkoivuro
(tkoivuro)
13
GPS Update rate is one thing, if I remember correctly it should be faster than 5 Hz