GPS data in those logs is very consistent with no drops in moving baseline yaw or significant changes in satellite reception.
Current draw is also lower overall than the other vehicle shows (the first hovers at ~80A, where this one is ~65A). Will be interesting to compare GPS data against attitude and current on this second vehicle as your tests increase in intensity.
Vibration levels are also greatly reduced from the manufacturer log you provided in the other thread. You can always seek improvement, but the levels in these logs are fairly acceptable.
I decided to power the GPS modules from a separate 3A 5V BEC rather than directly from the autopilot (Cube Orange) UART. Using a multimeter, I measured the voltages the GPS were receiving: before this BEC addition, it was 4.6 / 4.7 V after reaching rtk-Fixed status, now it is 5.01 V.
Although all information indicates that this GPS problem has now been resolved, I do think it would be good to carefully analyse the logs regardless and make sure that this isn’t a temporary / faux solution to the problem.
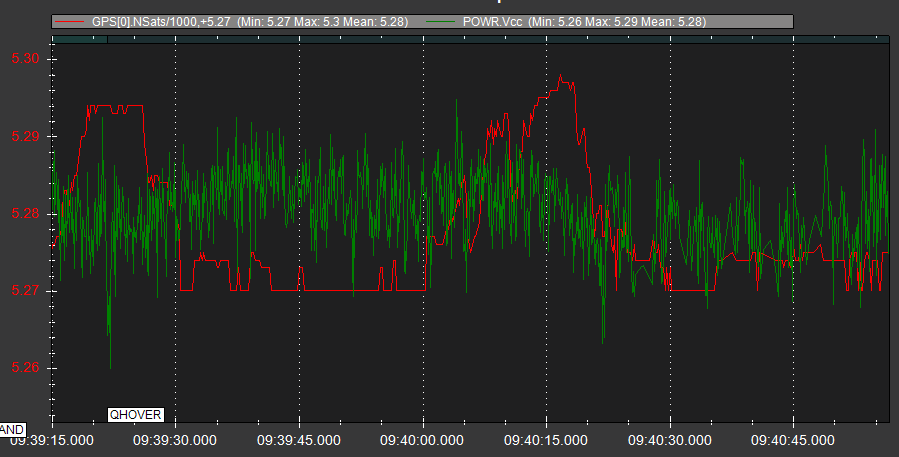
Note - in all of the logs from this problem you will see that the autopilot board voltage is a very stable ~5 V. Why do I mention this? Because if you are trying to debug a similar problem with a GPS (or any other device connected to a UART) then you should be careful of assuming that just because the board voltage is correct and stable the UARTs are also all fine - as this solution appears to prove, that is not always the case.
I did check board voltage in the logs and thought about mentioning power, but Vcc was rock solid, so I assumed it was not problematic.
However, these GPS modules do consume quite a bit of current, and autopilot board voltage will never tell the whole story. Voltage drops downstream of the supply absolutely happen, and ArduPilot does not collect/log GPS module voltage, even if it is available in the data stream (which I think UBX messages provide - correct me if I’m wrong).
This graph of a problematic flight’s board voltage vs a carefully scaled plot of satellite count shows that you can JUST BARELY correlate a drop in reception after each of the lowest spikes (troughs) in Vcc, and I hesitate to even call that conclusive evidence. I was just curious if it was even possible to spot a correlation at all. Your probe measurements tell a much better story than this plot.
I experienced a worse, but related problem when powering an ESP32 through an ArduSimple SimpleRTK2B board’s 5V output. The GPS module kept rebooting as power supply varied with hardware demands. Solved it in a similar fashion.