What type of boat frames our users would like to see. What type of categories people are usually using.
Thread to create ArduBoat preferred reference frames.
Monohull,
Multihull,
Racer,
What else?
What type of boat frames our users would like to see. What type of categories people are usually using.
Thread to create ArduBoat preferred reference frames.
Monohull,
Multihull,
Racer,
What else?
Intentionally empty, reserved for future listings
Not to get to picky, but, you may want to change Catamaran to Multihull. That way Trimarans would not be excluded.
Regards,
David R Boulanger
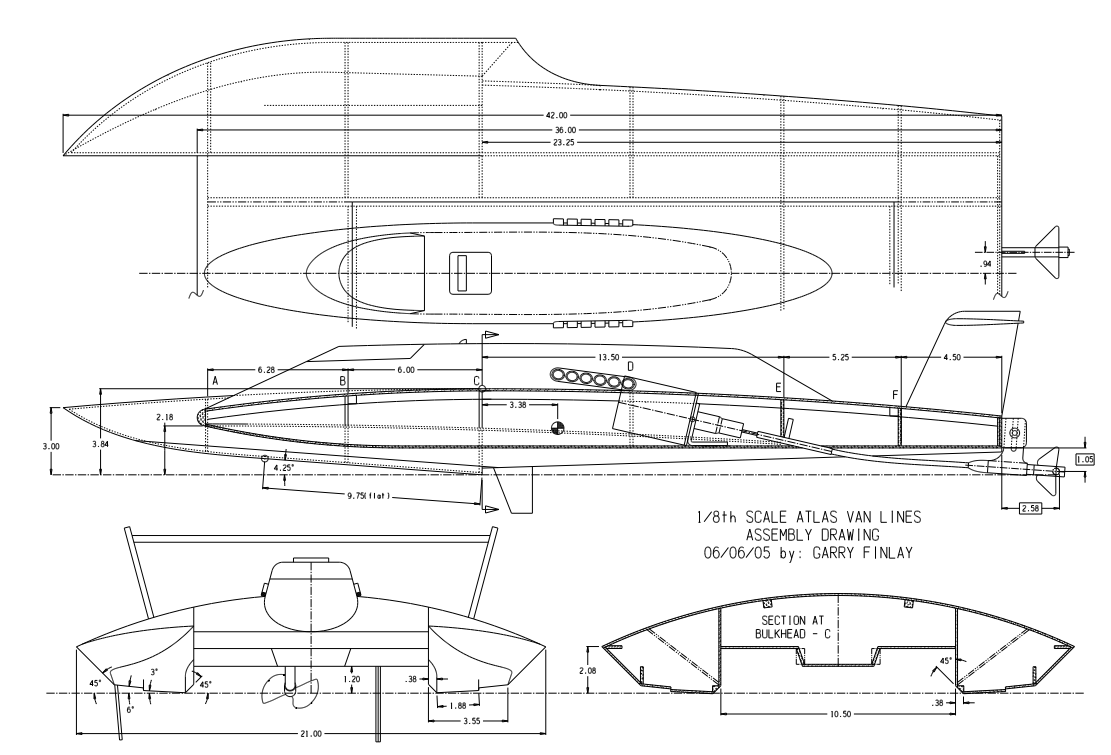
Found some nice looking Atlas Van Lines drawings. With some top modifications to allow better mounting for gpses etc this could be nice boat for ArduBoat and antonymous boating.
I’ve build a arduboat with a sonar based on an old bait boat (a catamaran design). Looking around on the internet most sonar boat’s are rather large and/or wide. I needed the boat to fit into my luggage because I need it at the other side of the ocean. So a bait boat is rather compact and I’m pleased with the stability and steering.
Guy
@gvr63 ah that looks really good. I will do some searching more aroubd thst type boats. Yeah catamaran will most likely be best type frame for Arduboat.
@gvr63 your hint for Bait Boats were great. I found a lot of different type boats and now evaluating some of them.
Can you tell measures of your boat and also what are good on it, what are bad and what you would like to change if you build next one.
I can estimate size of your boat based on components that I see on it but if you can give it’s measures it would be great 
Why push “airplane motor”. Easyness of the build or did you try to make some amphibious feeling to it?
Heres one rather nice looking catamaran bait boat.
@jpkh The boat is 540 x 380 x220 mm. Here is a picture of a new boat found on the internet:

I found my boat on a flee market for 15 Euro. At first the boat sailed like a brick. But with adding some weights at the right place and some fins it goes rock solid. The airplane motor is something special. The boat is designed for surveing an acid volcano lake in Costa Rica (pH about 0 and temperature 40 - 50 C). So no metal parts in the water. The air prop was the solution. The survey speed is 3 km/h and draws only 1.6 A.
Guy
@gvr63 yeah saw that frame too while browsing around net. Looks nice too. Maybe a bit new type cover and then it would be ok for ArduBoar use.
Ah yeah volcano driving needs a bit special things. Good point 
What I am looking is a frame around 500mm and 1000mm in length. This frame will later be as reference and standard starting point for building ArduBoat systems.
I am sure that @TCIII will be more than happy to have generic reference setup available
Not many kits out there that will give a versatile platform to accomplish many type of jobs. Mine was hand built and sometimes carry’s just camera’s, or an additional depth sounder for surveying, or can tow a 160 pound person in a ocean kayak at 2 Knots. 4 foot X 2 foot and about 14 pounds with 32 amps of Lipo power that’s good for about 5 hours plus. Its good up to about 20 pounds with extra payload or batteries. Any heavier and the hulls start to push a lot of water. Fully loaded at 20 pound it cruises at 2 1/4 - 2 1/2 Knots using 6 amps. Top speed is 6 Knots at the expense of many Amps.
Regards,
David R. Boulanger
That’s a great looking survey platform. And I really appreciate all the technical data that you gave too. Help’s a lot and gives some good starting grounds. Yours is made from flywood or foam covered with fibers?
Yes that is true, there are not that many good platforms available and that’s one thing we try to change. We are looking to have few different reference and basic platforms available for our users. Most likely we make some fiberglass bodies that people can modify easily when needed.
Your pontoon system actually gives few nice ideas. Let’s see how they will realize later on.
Here is a link to some details of the build. http://diydrones.com/group/arduboat-user-group/forum/topics/arduboat-built-from-scratch-is-almost-ready-to-go.
Regards,
David R. Boulanger
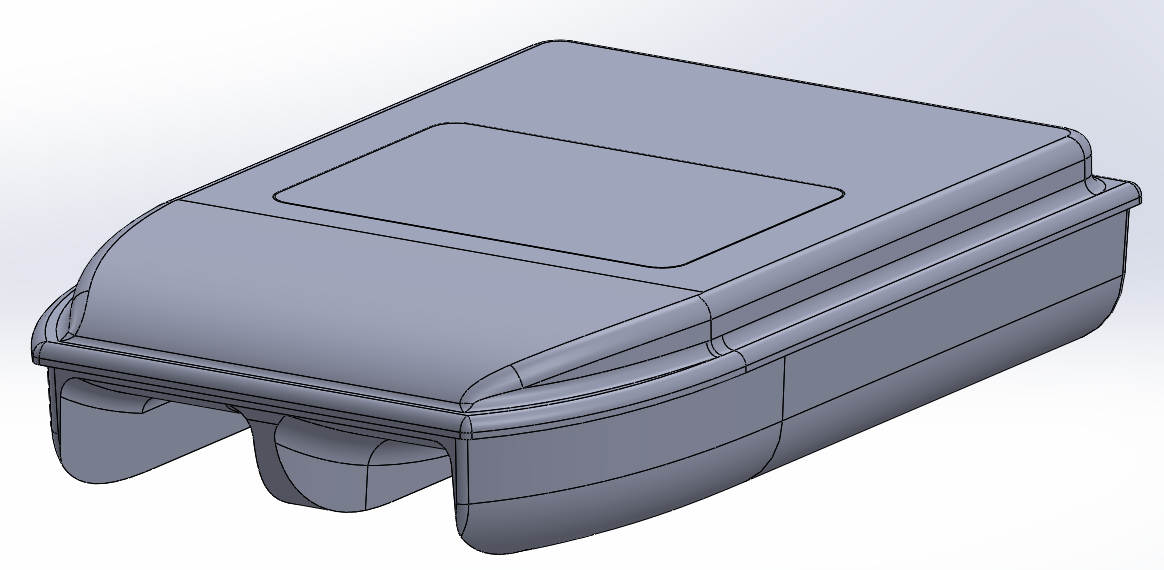
Made a quick 3D drawing of one boat frame that I have in my mind now. It’s 500mm wide, 750mm long and 160mm high. Can be mounted with underwater thrusters or motor above main deck similar way like @gvr63 had earlier. Mast etc is not drawn on this pic.
Comments please
@jpkh It’s a beautiful design. But for projects like I do it is rather big. It won’t be easy to get this one into your checked baggage and to carry it in a backpack. Here is a picture from last week with me carrying the boat into the Poas volcano in Costa Rica. Second person on the picture. The boat is in the big black sack on my back.
And here is the boat ready to be put in the lake. This is an acid lake and has a pH of 0.5 and is 55 °C hot. No place to take a bath! Imagine this with a boat double it’s size. Would get very tricky to put the boat in the water without accidents.
What material do you have in mind for the boat? My boat is in ABS and survived the hot acid without a scratch.
Just my two cent
Guy
Guy, yeah it’s a bit bigger than yours but that’s mean for common level operations and as an entry level frame. Sure later is can be made smaller too. That is just scaling. Let see, maybe we make first 2/3 scale size of it then it would be 500 x 330 x 110
As for materials: Composite with internal bulkheads to carry all electronics etc inside.
Very nice. Very similar to what I have been thinking of building as a second boat. The size all depends what purpose it is built for. Mine is 1200mm x 650mm. Fits in most cars easily and can carry a lot of “stuff”. And at 20 pounds or less loaded is not that hard to carry. Again very nice job!!
Regards,
David R. Boulanger
Very nice but it is weaving. What is your NAVL1_PERIOD? You might need to increase it.
Thanks, Grant.
Hi, John
great presentation
I would like to build an autonomous boat like that one.
I would like to get in touch with you
my name is Francisco, from NYC 347-624-8875
Great job.
I want yo build an autonomous boat like that for fishing purposes. I would like to know if you use mission planner and Pixhawk? if so, do you use Ardupilot firmware ?
My concern is the one servo that will be used for the rudder instead of 4 servos for a FPV, UAV and/or a rover.
Thanks
Francisco
NYC
347-624-8875