Hello friends.
I have tuned and flown many VTOL drones. The main way I fly the drones is to take off vertically in QLOITER mode and transition to fixedwing flight by changing the flight mode to FBWA. I did this more than 100 times on 3 different types (40 kg gasoline engine VTOL drone, 10 kg electric power VTOL drone and 20 kg gasoline engine VTOL drone). It’s Important to say that I did all of this with Radiolink Pixhawk and there wasn’t any big problems.
Recently I switched to Cube and started to tune and fly a SwiftVTOL composite material drone. I did the tunings and QLOITER and Auto modes were working nice. After performing many flights, I started to do some automissions.
I plan my automissions like this:
VTOL_TAKEOFF -----> alt 20 m
DO_CHANGE_SPEED -----> speed 18 m/s
WAYPOINT
WAYPOINT
WAYPOINT
.
.
.
I did this about 5 times in 2 different days.
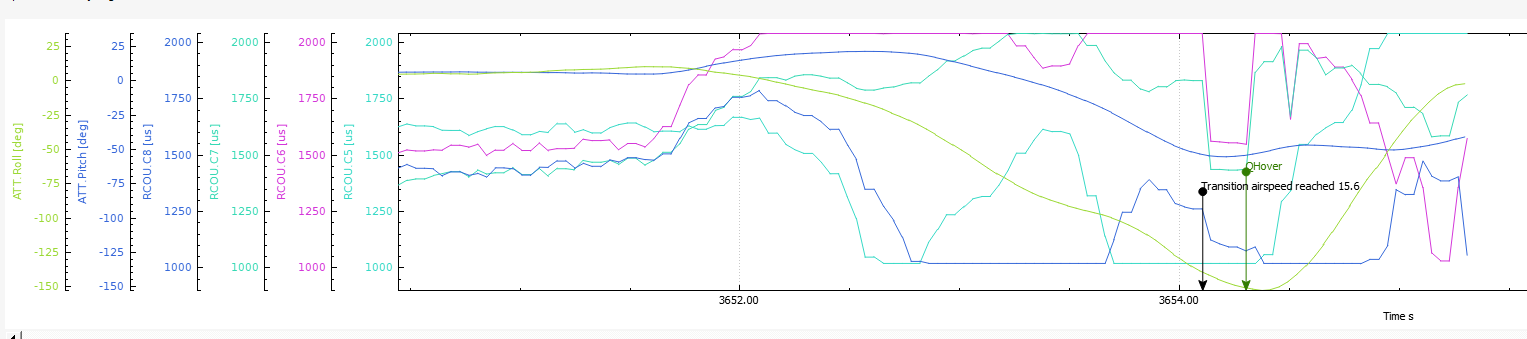
but the last one was a very bad crash. The drone took off and go to 20 m alt. Then changed the throttle to 95% and started the transition. after reaching transition speed, it flipped and crashed into the ground. I had “BAD AHRS” on HUD and EKF YAW RESET message in last flight.
Also I forgot to Calibrate Airspeed on last flight and the Airspeed was reading about 5 m/s on the ground. but I don’t think the Airspeed was the main problem. because I was calibrated the Airspeed on the first flight and haven’t changed the main battery in 3 flights. It means that the Cube wasn’t reset since the first flight. So the 5 m/s of Airspeed was maybe bacause of the wind that it was sensing.
I think the problem comes from the Cube  but I’m not sure.
but I’m not sure.
My config. is this:
4 x T-Motor U7 kv420 with 18"x6.1" CF Props for vertical flight.
1 x T-Motor MN4120 with 13"x9" Aeronaut fixed propeller for cruise.
1 x 8s7p 18650 Li-Ion battery for cruise.
1 x 6s1p 4500 mAh 75c Li-Po battery.
this is the telemetry log and flight control log download link:
It will be very helpful, if you share your experience and guesses about this issue.