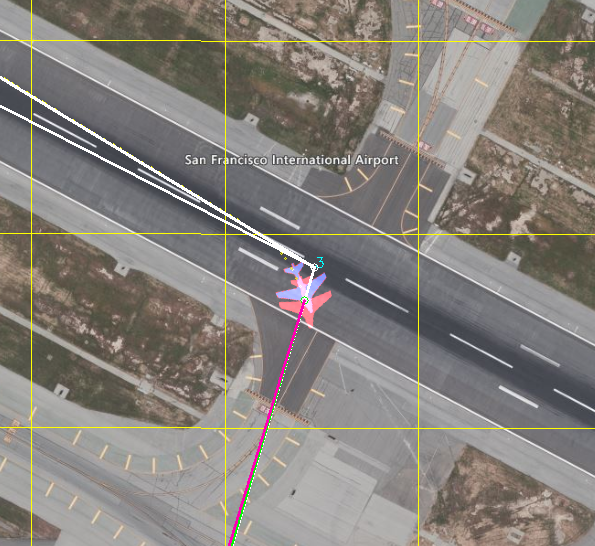
i´m doing SITL Simulation with Matlab and MAVProxy. On the map are two aircrafts displayed. One is white and the other is red. Can someone explain why there are two aircrafts displayed? I´m guessing these might be two different position estimators but i don’t now. I also notice quite a difference between the displayed aircrafts.
I´m calculating the position in Matlab (force -> acceleration -> velocity -> position) and send it via the JSON format to the firmware. How and with which values is the GPS calculation done inside the firmware?