Hello, today I had the pleasure of ripping a brand new Believer 1960 to shreds, possibly due to criminal stupidity. Let me start at the beginning.
I had finished building the Believer, with a Pixhawk (original, not 2.1) running Arduplane V3.8.5.
My props were counter rotating, moving inwards at the top of the arc. The props were hand tightened with no thread lock.
I took it to the field for its maiden flight, did my preflight checks and triple checked that deflections were in the correct direction in FBWA.
I first did a “floppy throw”, simply tossed it and then immediately cut power to see FBWA works as it should. It landed just in front of me but the right prop came off. I assumed I had neglected to tighten it properly so I put it back on and hand tightened it as much as I dared without fear of damaging the threads.
I then did an unpowered throw, I climbed on a pile of rubble and threw it (there was a helpful breeze) hard while disarmed in FBWA, again to check that it behaved ok. It did indeed.
Third time’s the charm, I was somewhat apprehensive because it has a very wide fuselage and I cannot fully grasp it, it’s more a sitting on the palm than a grab kind of thing. I knew that, if I gave full throttle I would not be able to hold it and would need to throw immediately but without too much force due to its ungraspability.
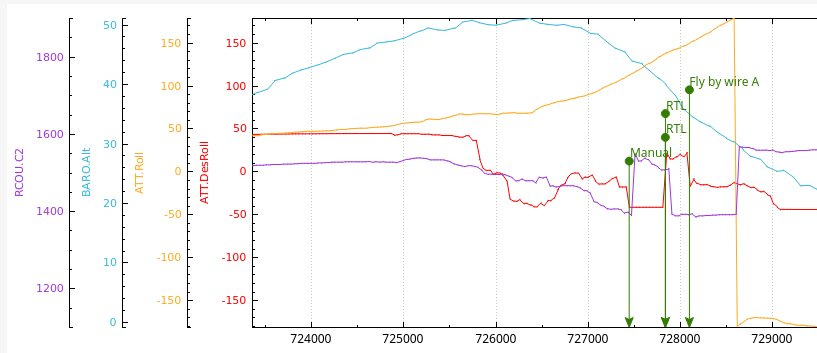
I full throttled and threw and it did an absolutely beautiful take off in FBWA. I had been concerned about perhaps not having enough throw on the tail control surfaces but it climbed beautifully so I quickly switched to RTL to bring it over my head. It rolled right, which is fairly standard turn direction but then kept rolling lazily to the right. I had a heart stopping moment when I realized that it had gone way beyond the roll limits of RTL and was showing no signs of stopping. I frantically switched to FBWA but I was already seconds from disaster, I lost sight of it almost inverted, in a dive at full throttle, heading towards a line of trees from left to right. A second later, bits of airplane punched through the trees and flew out of their right side. Another second later, I heard a loud crash.
Examining the scene of the crash, I came across most of a plane hanging on a tree and the rest of it sprinkled on the grass (photo). The batteries had escaped, taking the front of the fuselage with them so there was no question of props spinning while damaged, most likely all power was cut at the moment of impact.
Now, this is where it gets interesting. The right motor prop was loose (but not completely unscrewed) and broken (photo). The gap that you can see is 3.5mm, quite a bit of unscrewing to have happened during the crash.
Finally, the telemetry and dataflash logs are zipped together here.
Now, my question is this, was the crash due to the autopilot (for example, some reversed channel) or was it the result of the right prop coming loose shortly after takeoff?
Looking at the telemetry log, I think the autopilot tries to deflect correctly (to counter the roll to the right). If this is indeed the case, it might make sense that, as the right prop loosened, the right motor lost thrust, the left wing overtook and eventually turned the plane upside down.
If that had been the case, the correct reaction would have been to cut power, let FBWA return it to level and glide down.
So, what do you people think? Was the culprit a lack of thread lock or was there something else going on?