I’m working on a new build that’s a little trickier to tune than my previous Arducopter aircraft and after experiencing some unusual and inconsistent performance, I wanted to see if there might be something I’ve missed along the way.
Aircraft specs and information below:
- X8 coaxial octocopter
- MAD MOTORS MAD 6X 12-II 170KV arm sets
- 22x7 carbon props
- Cube Orange
- Here 3 GPS
- 2 x 6s 16000mah Lipos in series for 12s power
The frame is a self-built frame that’s just a simple symmetrical plate + tube design. It’s somewhat overbuilt and is very stiff. The payload (gimbal and camera) is fixed to a plate that has ‘alpha gel’ vibration isolators to try and reduce any vibration being transmitted to the payload.
- AUW (no payload) = ~9.5kg
- AUW (with payload) = ~14kg
I’ve followed the tuning guide (as always!) and ran into some issues along the way:
- Initial flight showed the temporary landing gear vibrated dramatically, leading to oscillations. Elected to re-build landing gear to reduce vibrations.
- New, much stiffer landing gear still oscillated (seemingly from prop wash) but significantly less, reducing Pitch and Roll PID made aircraft much more stable
- Alt-hold test to prepare for autotune resulted in Z oscillations. Landed and reduced PSC_VELZ_P by 50%, Reduced PSC_POSZ_P below the minimum to .4 - no change in oscillations.
- Set PSC_ACCZ_I and P to suggested values in tuning guide - Alt-hold stable. Observed that MOT_THST_HOVER was very low (.128 or so)
- Followed harmonic notch guide and set to 97hz - aircraft flew well
- Autotuned axis one at a time - aircraft tune felt quite ‘tight’
I was reasonably confident in the aircraft at this point, so I replaced the landing gear with the payload (which has its own integrated landing gear) with a spare battery in place of the camera as dummy weight and conducted another test flight.
I observed some vibration from the landing legs, but it seemed to be performing quite well.
Landed after an uneventful flight, and checked motor temp etc. all was well, so decided to finish the batteries with another flight.
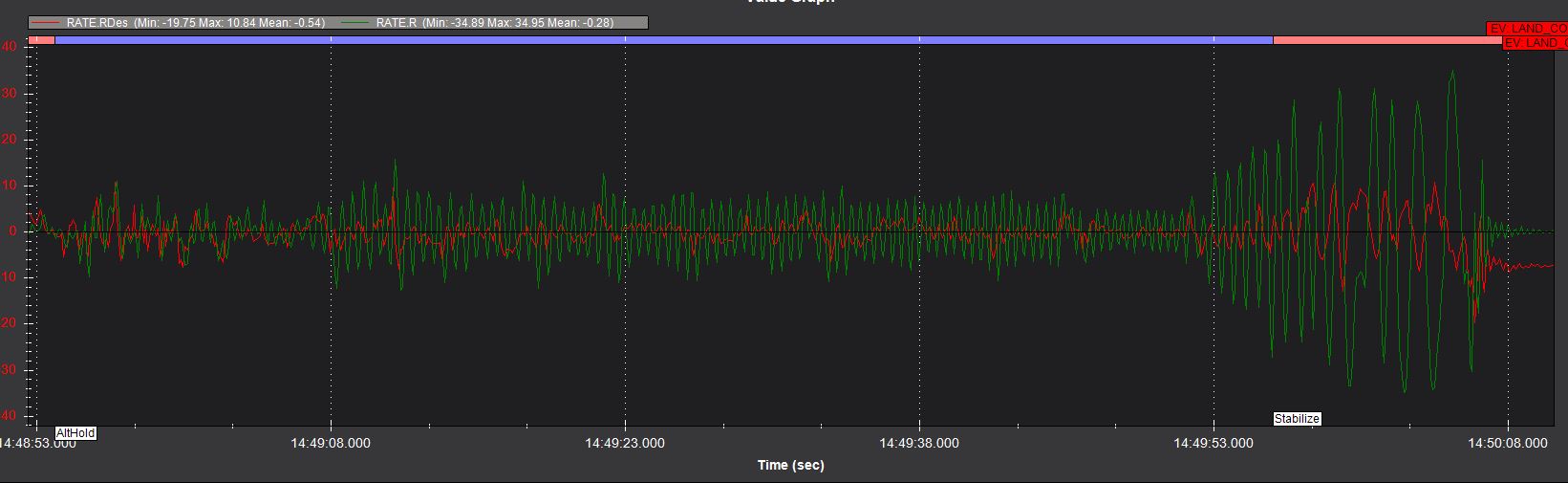
This time, the aircraft oscillated dramatically on takeoff, it looks as though it was originating from the landing gear, but it was hard to tell.
Tried again in order to grab some video and see if I could determine the origin of the sudden vibration, same result.
What’s got me stumped, is the change in behaviour between the first flight, and the two little hops. I didn’t change any parameters between the two flights, but it flew very differently. I checked for some kind of mechanical failure, or anything coming loose, but couldn’t find anything.
I’ve attached the log of the ‘successful’ flight, and the two small hops where dramatic oscillations were observed.
Is there something I’ve missed that may have caused this behaviour? This is the first large aircraft I’ve tuned, so my knowledge of tuning and log analysis is very limited. Any advice or suggestions would be appreciated!
https://drive.google.com/file/d/1IbtlUUf8V_6RyAir1ValMQrUF9eUItGJ/view?usp=sharing