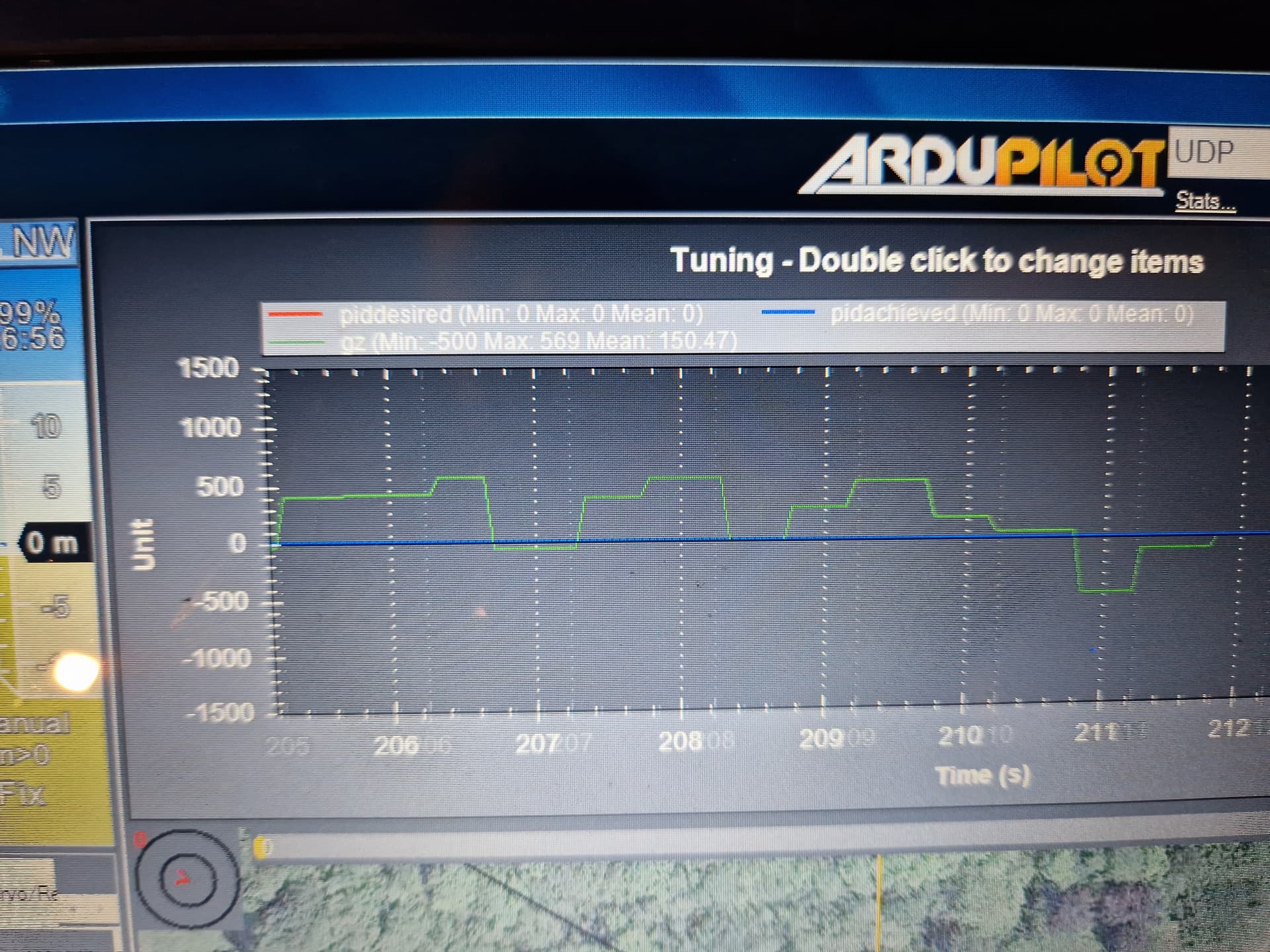
Hi Guys, Trying to set up the turn rate pid tuning so i can get a bit less snaking at the start of a way point when the boat starts off. I have followed the online guide but i can’t get the PIDACHIEVED line to move from zero mark. Im in manual mode and set up GCS_PID_mask to 1. The GZ line does move to what looks like 500 but not the PID Achieved. Any ideas?
yes in manual mode. The video says use manual mode to get the maximum turn rate off the PID achieved graph, then move to acro mode and see how they compare. In manual mode i cant get the PID achieved graph to move off zero so unsure what to set the ACRO_TURN_RATE to.
Now I get it. You are trying to determine the max turn rate in manual first. I didn’t had that issue and I don’t know about that. I hope somebody clears that issue for you.
When you’re driving along (or when you’re stationary) and you give full left(or right) deflection, can you eyeball how fast the vehicle turns? That might give you a close enough ACRO_TURN_RATE to start running. Another option is to download the .bin logfile and look at it in Mission Planner to determine the max turn rate in manual mode.
Thanks. Will this be the ‘Turn rate’ under STER in the bin file?
ok, i think im getting somewhere now. I just ran it at home on ACRO mode and can see the acheived and desired following each other like the video. So now once i get the ACRO TURN RATE set correctly, i can play with the PID FF settings. Its odd that in Manual mode the PID achieved shows nothing but if i can get round this from the bin file, so be it. Thanks
Thanks for all your help. Managed to get back on the lake and tune the acro turn rate and the Steering rate. It drives fine in manual mode and auto mode now apart from one issue. When the boat heads off to a weigh point its goes in an S shape before going straight to the weigh point. I tried recalibrating the compass many times, but it still does this curve at the start of the heading. Here is a video showing the issue. Any ideas? I can post the bin file too.
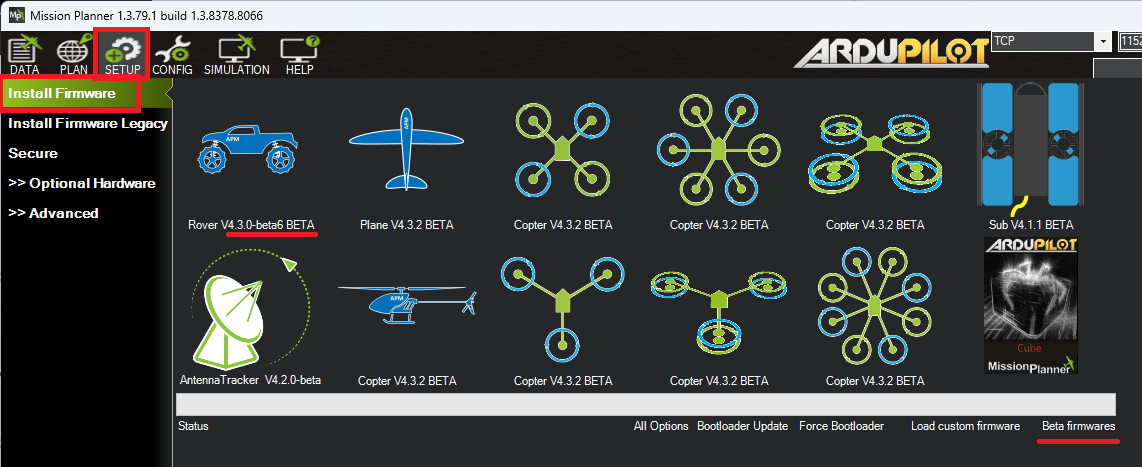
It looks like you may be using 4.2 so you could follow the older instructions. Alternatively you could move up to 4.3 which is available as a beta and then use the 4.3 instructions.