Secondly FFTs have a Schrodinger-like relationship between frequency and time - you can choose high time resolution or high frequency resolution, but you cannot have both at the same time.
Heisenberg-like, not Schroedinger-like.
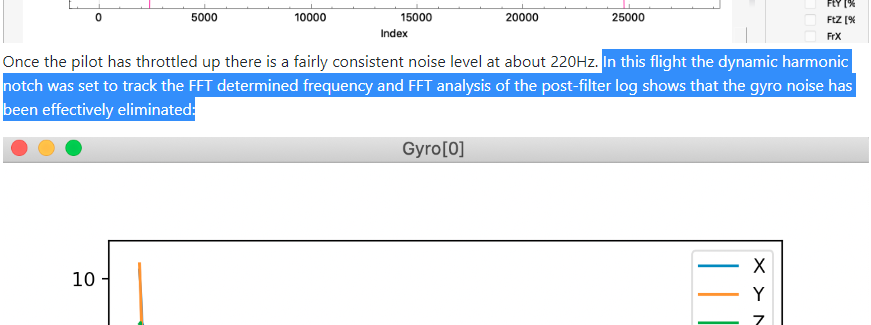
Caption:
Pick top or bottom, but be consistent. You use bottom caption for the other images, so I think the highlighted section should be moved below the second image.
@andyp1per it seems to me that what I read in FFT docs in the paragraph “Harmonic Notch Throttle Configuration” summarized here:
Stable hover for learning the values, then
INS_HNTCH_FREQ ← FFT_FREQ_HOVER
INS_HNTCH_REF ← FFT_THR_REF
are not in accordance with what you posted earlier:
It needs testing but works well in SITL. So feel free to try, but caveat emptor I have not flown anything larger than a 4" in my office with this yet. I would be very surprised if there were issues however. It’s more about getting data for the optimum notch separation.
The larger copters always have a wider peak that the double notch would help with.
Hi @andyp1per and other notch filter experts,
This is our first time trying the notch filter and following the instructions for it.
We would appreciate an experienced person checking these log files and see if we did everything correctly.
I’m aware we should probably set INS_HNTCH_ATT to 40, and will do so ASAP.
Also I wish to know if there is any parameters we should disable or change once the notch filter is confirmed set up correctly - for example do we set INS_FAST_SAMPLE,0
Copter is 450mm diagonal, 9 inch props, 1157KV motors, 3 cell LiPo
The second log is the best. Why did you change REF to 0.28 in Log3? Your hover graph shows that 0.313 is much closer to the appropriate setting for a hover freq of 105Hz.
As you say increasing BW and ATT will help, I think the bumps in the full flight test are because you have the wrong ref (unless you want to scale from a lower frequency, but in that case you need to set FREQ as well).
But looks pretty good. I reckon it’s more like 103Hz FWIW
Thanks, we’ve set:
INS_HNTCH_FREQ,103
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
INS_HNTCH_REF,0.3134342
…and will update how it goes.
The quad was flying very well before this, and it’s been hard to tell any difference since enabling the Notch Filter.
Should we change INS_LOG_BAT_OPT,2 or any other params once we’re happy with the harmonic notch filtering - but obviosuly we want to keep the feature working ?
Just want to minimize unnecessary logging and CPU load.
Depends on your FC and SD card, I use fast SD cards and always have this setting on. The load is not appreciable and actually if there are problems you just won’t get log messages.