Agreed. So is the thinking I should leave the filters as they are?
It still looks pretty noisy to me. If your ESC telemetry is actually working I would expect to see much less noise than this. Can you check that your ESC rpm values look sane and maybe do a graph showing rpm, throttle and CTUN.N (the dynamic notch frequency).
Post-filter will always look better because of INS_GYRO_FILTER
Also set the bandwidth to more like 30
@andyp1per Here you go. The RPM is right as according to the motor specs 50% throttle is about 4k rpm
That looks right - and now that I look more closely you can see the filter cut in the two peaks - I think you just need to set the bandwidth a bit wider (40 say) and the attenuation at bit deeper (40 say). Be careful though - 63 Hz is right in your control bandwidth so you don’t want to take too much out.
What do you have INS_GYRO_FILTER set to?
Thanks @andyp1per
My ins_gyro_filter is set at 35.
Is the attenuation the ATT setting? If so the max setting according to MP is 30
Yes ATT is attenuation. It’s fine to set it higher. 50 is a true notch. 40 is close enough.
Ok thanks. I will try it at 40
Look at this strange FFT… This is the copter I switched from Omnibus Nano to Kakute Mini…
Omnibus FFT. Accels and gyros basically match. Peak at the motor frequency.
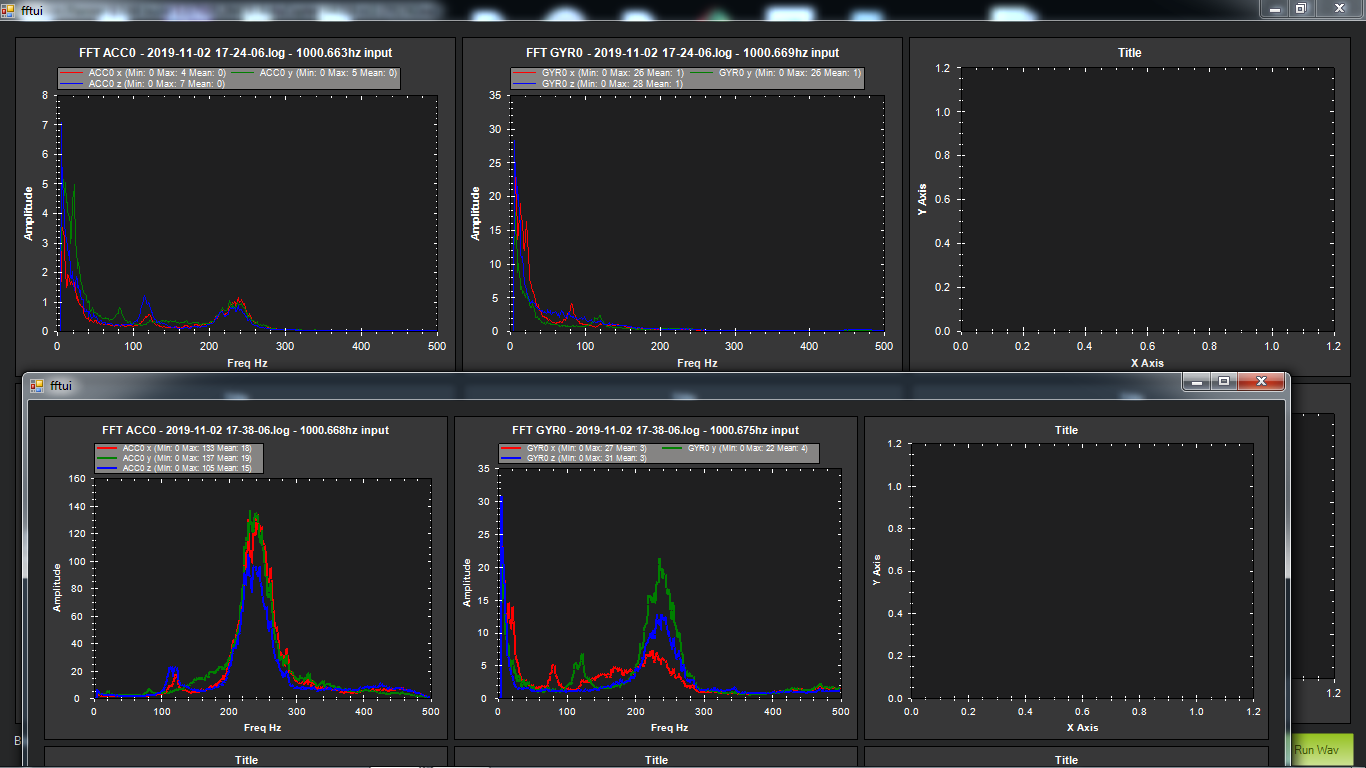
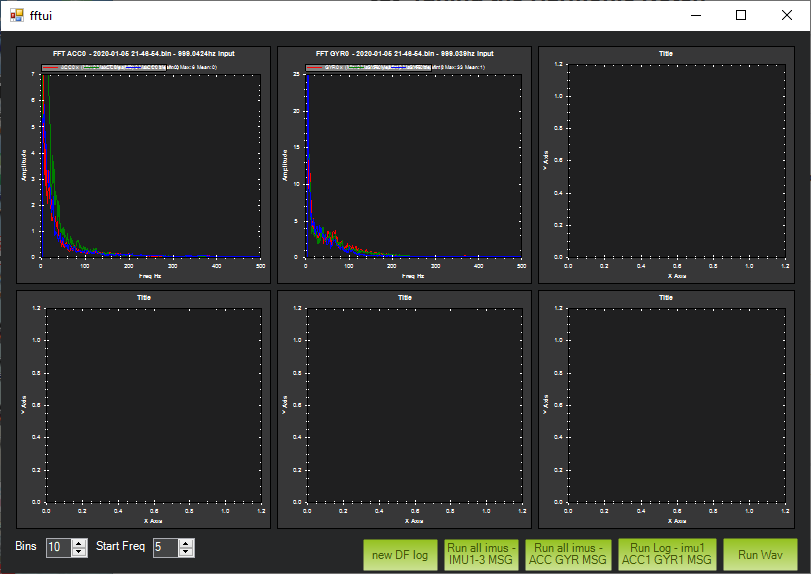
Here it is w/ the Kakute mini… With major vibration mitigation… Best balanced props i’ve ever done.
There’s almost no noise on the gyros at the motor frequencies. I am guessing the two peaks at about 90 and 120 are frame resonance? I have a static notch on the 90hz peak already. Dynamic is set to the same motor frequency as it was with the omnibus.
Any thoughts?
First thing that come in my mind is that the two board have different IMU chip, Kakute Mini ICM20689, Omnibus Nano MPU6000.
Yes, and I struggled with the icm20689 a LOT. (In the kakute mini problems(or just problems w/ my build) thread). Vibrations were completely fine w/ the omnibus. It was unflyable w/ the kakute. I eventually got it to fly, but it’s still not as good as the omnibus.
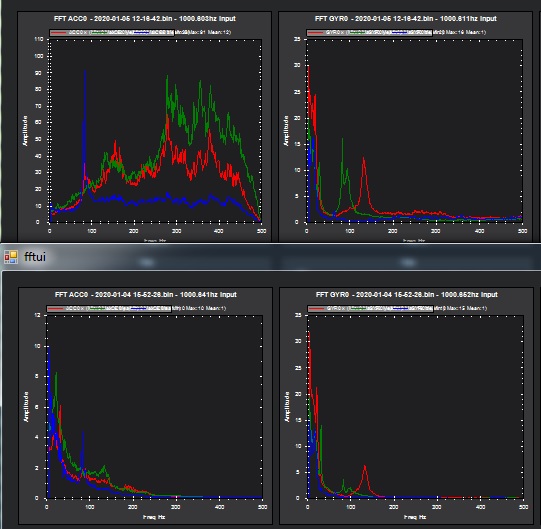
It looks like all the vibration mitigation I did helped w/ the motor noise a lot. But where is all this other noise coming from w/ the icm20698? Should I bother with the dynamic notch on the motor frequency now since I’ve got my props so well balanced, and those other peaks at 90 and 130 are so much bigger than the motor noise? Maybe I should just make it static at the 120hz peak. So just have a static at 90 and another static at 120…
That accel graph simply does not look normal and there’s no correlation between the accel and gyro which there would be if this was a physical effect. I remain convinced that it’s something weird electrically, but I could be wrong 
Have you made an FFT w/ your kakute mini? I have tested two of them now with the same results.
And any thoughts about how to best filter? Would you do something w/ the two peaks at about 90 and 130, or leave it dynamic for the little motor noise that’s there?
And do you think I’m correct those two peaks are likely frame resonance? The frame isn’t symmetrical… the motors are closer together front to back, than side to side. Maybe that’s causing two peaks?
Now that I have fixed logging I’m going to see if I can do enough of a hover in my office to get some data.
You might need to hold it or tie it down and measure high throttle.
My hover vibes look pretty equivalent between the two FC’s… But once some vibrations are introduced, the kakute shows them at a much higher amplitude than the omnibus.
Or it’s something electrical like you mentioned… Either way, it’s proportional to the throttle.
My flash fixes aren’t working  I won’t be able to get a log today
I won’t be able to get a log today
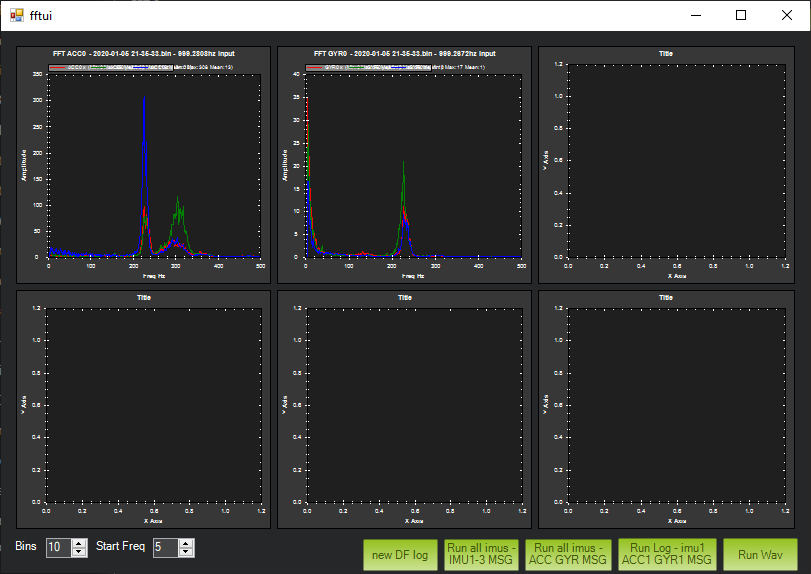
Ok, flash problems fixed. Here’s pre-filter hovering for a minute:
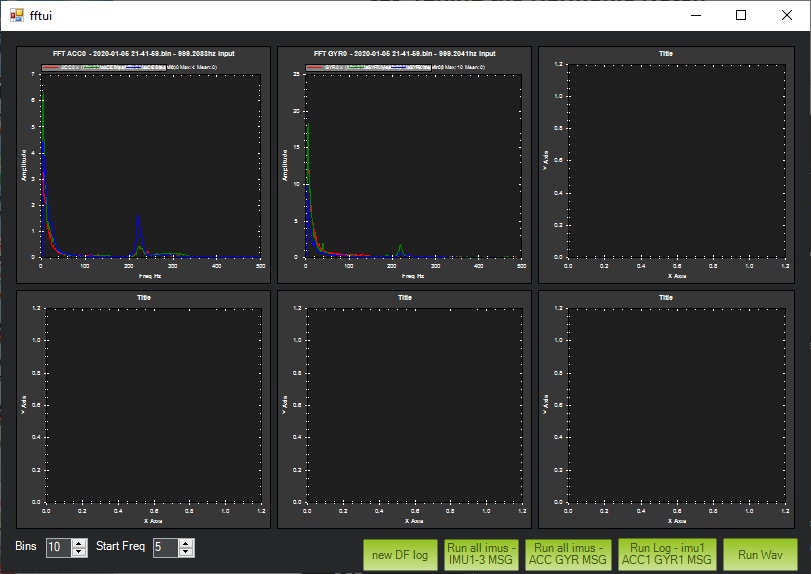
Here’s post-filter hovering for a minute:
Here’s holding on the ground blipping the throttle up:
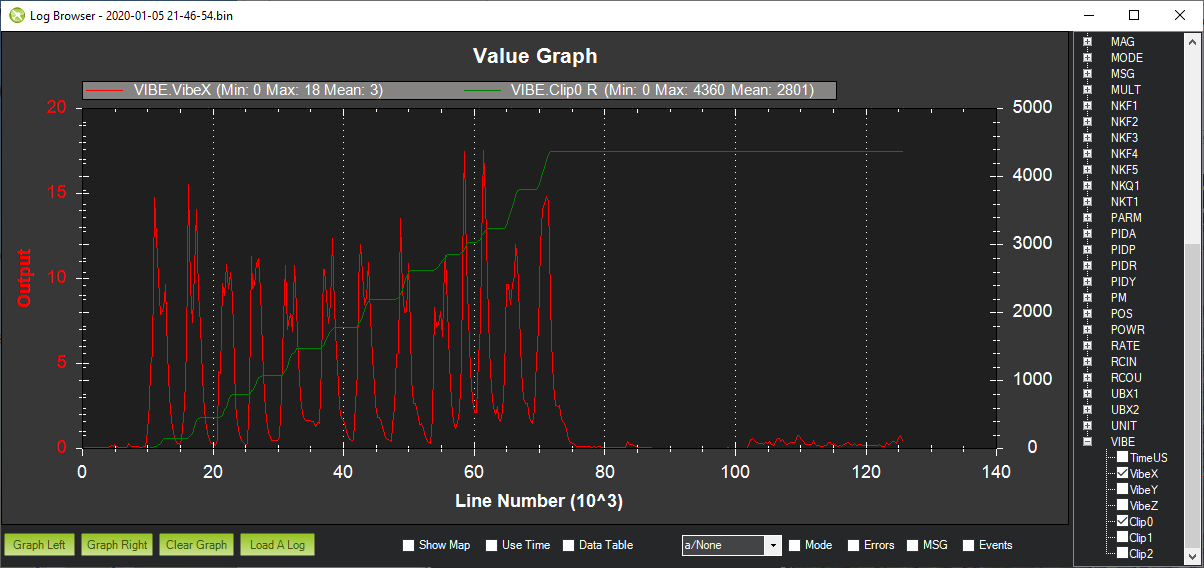
Here are vibes and clips for that last log:
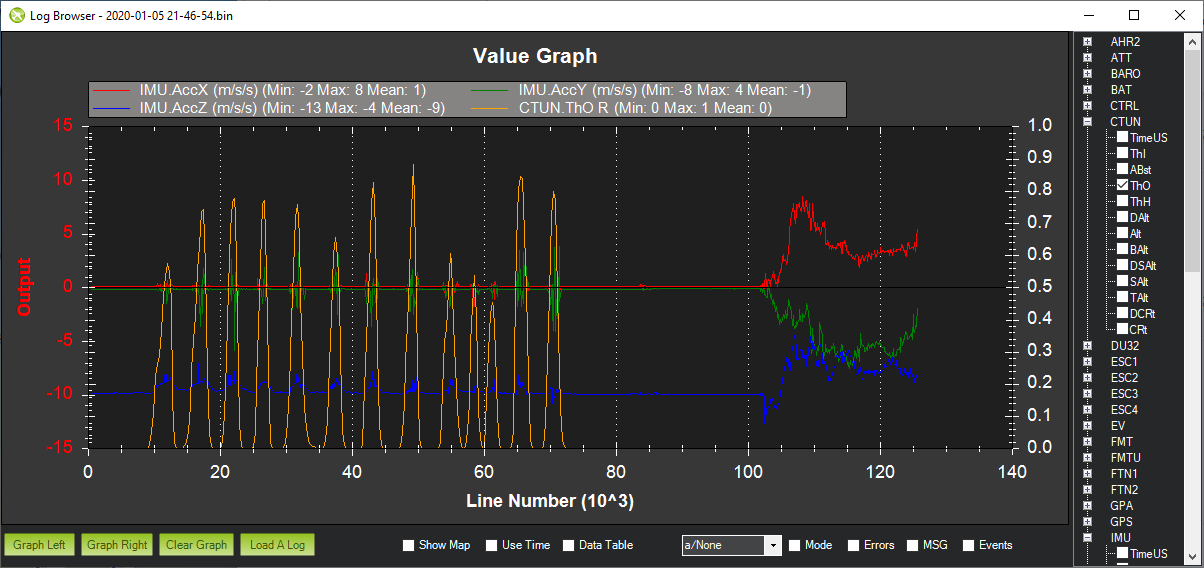
Here are accel values against throttle:
And what you need to remember is that these are 3052 3-blade props running on 3800kv motors on 4s so the scream is deafening.
Looks pretty good to me 
yes, looks good.
What the heck is going on w/ mine??? I guess I’ll rebuild and try soft mounting… or at least rubber standoffs in addition to the supplied grommets.
Well, thanks for the data.
The clipping seems bad, but maybe that’s safe to ignore.
And let me know if those look much worse after a real flight… Holding in hand with full throttle was much better looking than an actual full throttle flight… Which makes me think, maybe a foam pad under my battery would damp some of the frame resonance… I’ll try that now.
It’s interesting that the accels go nuts at the end when on the ground - that’s when I am downloading the logs. I know this is a known problem due to CPU load, but I am surprised it shows up in this way - surely if the CPU is pegged we would get fewer samples rather than samples all over the place.
Apropos of the the oneshot125 bug - how do you have dshot configured?
I’m using dshot600
Originally on 1200, on 600 now. no difference.
Pad between battery and frame made no difference… I really don’t understand. This is the lowest vibe copter I have now… My video is beautiful… looks like I have a gimbal.
Maybe I should do your 3s battery test… I’ll order a battery. (all my 3s’s are for bigger copters)