I tried the harmonic notch filter on a little 380 size helicopter for the first time. Can you please take a look at my log and advise if I’ve got it setup right?
Main rotor RPM: 2220
Tail rotor RPM: 8340-8400 (I believe)
Electric motor RPM: 11,100
Hi @andyp1per,
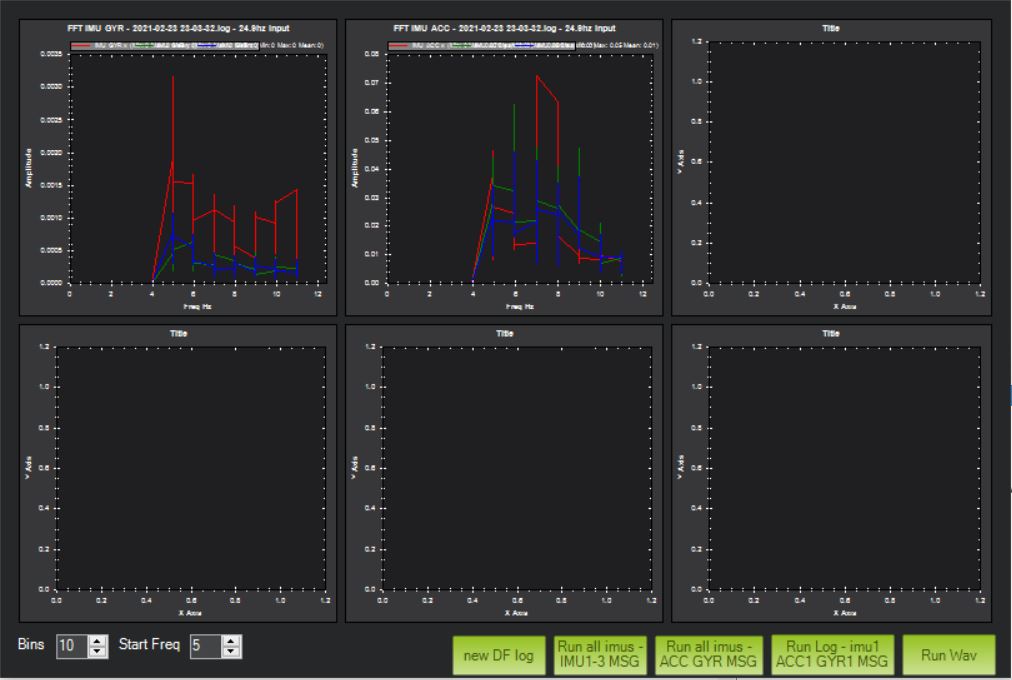
Ive been having issues with FFT. For some reason the input freq. is 24Hz. Ive tried using mavproxy but the output says “extracted 0 fft data sets”. I followed the documentation for FFT even in-flight FFT. The props are spinning at 5000RPM/80Hz. I have ESC telem connected and set up on a cube orange.
Hi I am trying to learn and use Notch Filters but I can’t even display my log. Can we try to do step by step guide ? I would like to use Harmonic Notch Filter in my octocopter with 16" propellers, 6s, weight with camera around 12kg. I am flying without gimbal and camera for this test.
I checked and set parameters:
INS_LOG_BAT_MASK = 1
LOG_BITMASK without RAW IMU
INS_LOG_BAT_OPT= 0
I would like to do throttle based setup but I didn’t found “INS_HNTCH_MODE” = 1 in my parameters list in Mission Planner???
I did gentle hover flight for few minutes (Log here)
I tried to load it in FFT filter but I get empty screen. What I am doing wrong ?
Hi,
I’m also in the same situation as you,
although I have read the ardupailot wiki several times I do not know how to do several steps to find the values that need to activate the notch filter … get the FFT… how to determine the frequency to be taken as a reference etcc …
It would take some practical examples and described step by step on how to perform them … so that everyone can proceed on their own without always being asking …
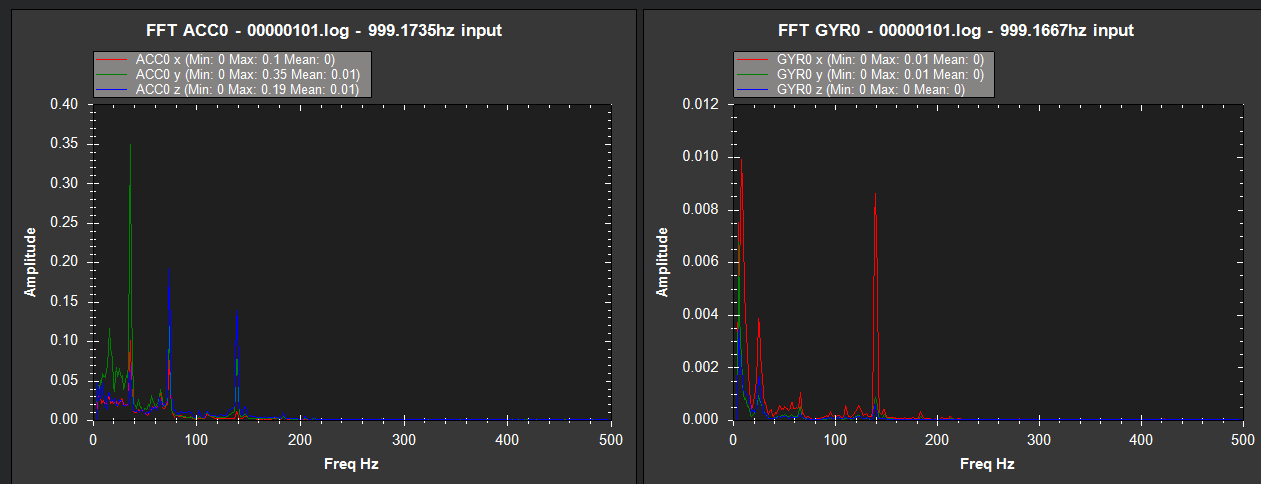
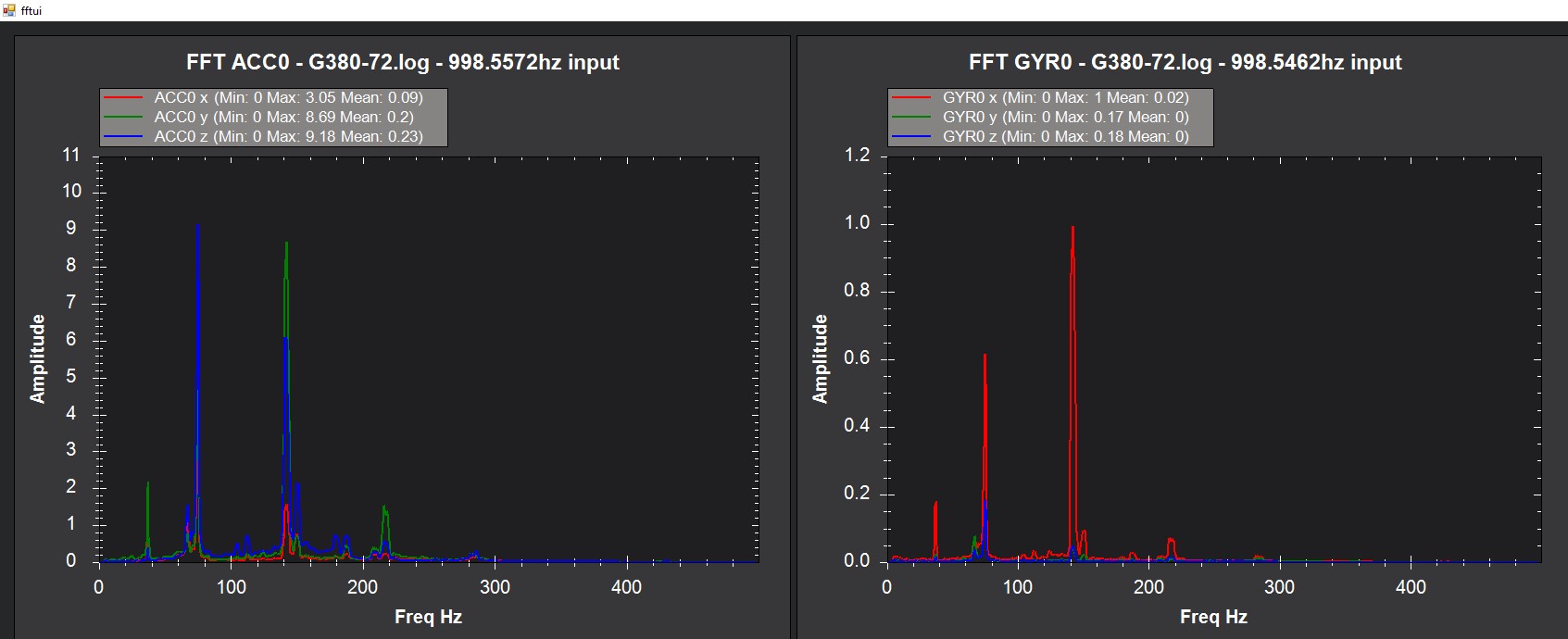
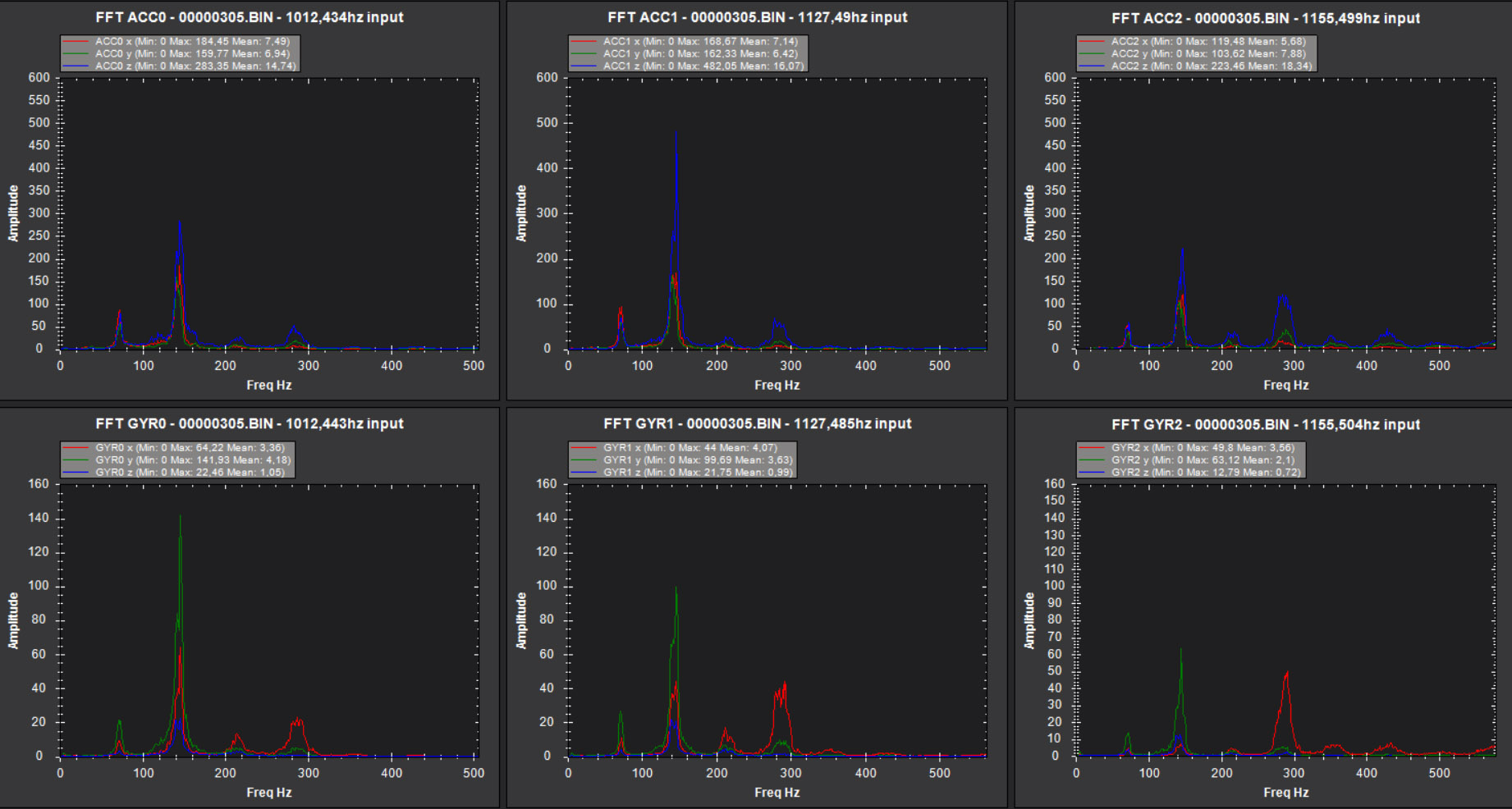
Ok so I did the test flight. This is a log from gentle hover (304
and I loaded log into FFT part of Mission Planner and I have peaks around 75 Hz, 150 Hz, 216 Hz and 286 Hz:
So as I understand I should start form creating Notch filter something like that:
INS_HNTCH_REF=0,2209552 (my MOT_THST_HOVER)
INS_HNTCH_FREQ=75
INS_HNTCH_BW=32
???
INS_HNTCH_FREQ is the noise frequency for the first hamornic so 70 in your case
INS_HNTCH_REF is the throttle scaling usually the same as MOT_THST_HOVER so 0.22… in your case
INS_HNTCH_BW is best set as half the frequency = 70/2 = 35 in your case
Thanks for the response! I just did a minute hover in alt hold. I am still getting the same issue with the fftui showing 24Hz after changing the suggested parameters.
I have a Cube Orange on the drone using the default SD card. The CPU load goes up to 35. Currently I am extracting the Acc and Gyr data from the logs and putting them into a fft script until we can figure this out. I will need to go out to buy a class 10 sd card and fly tomorrow