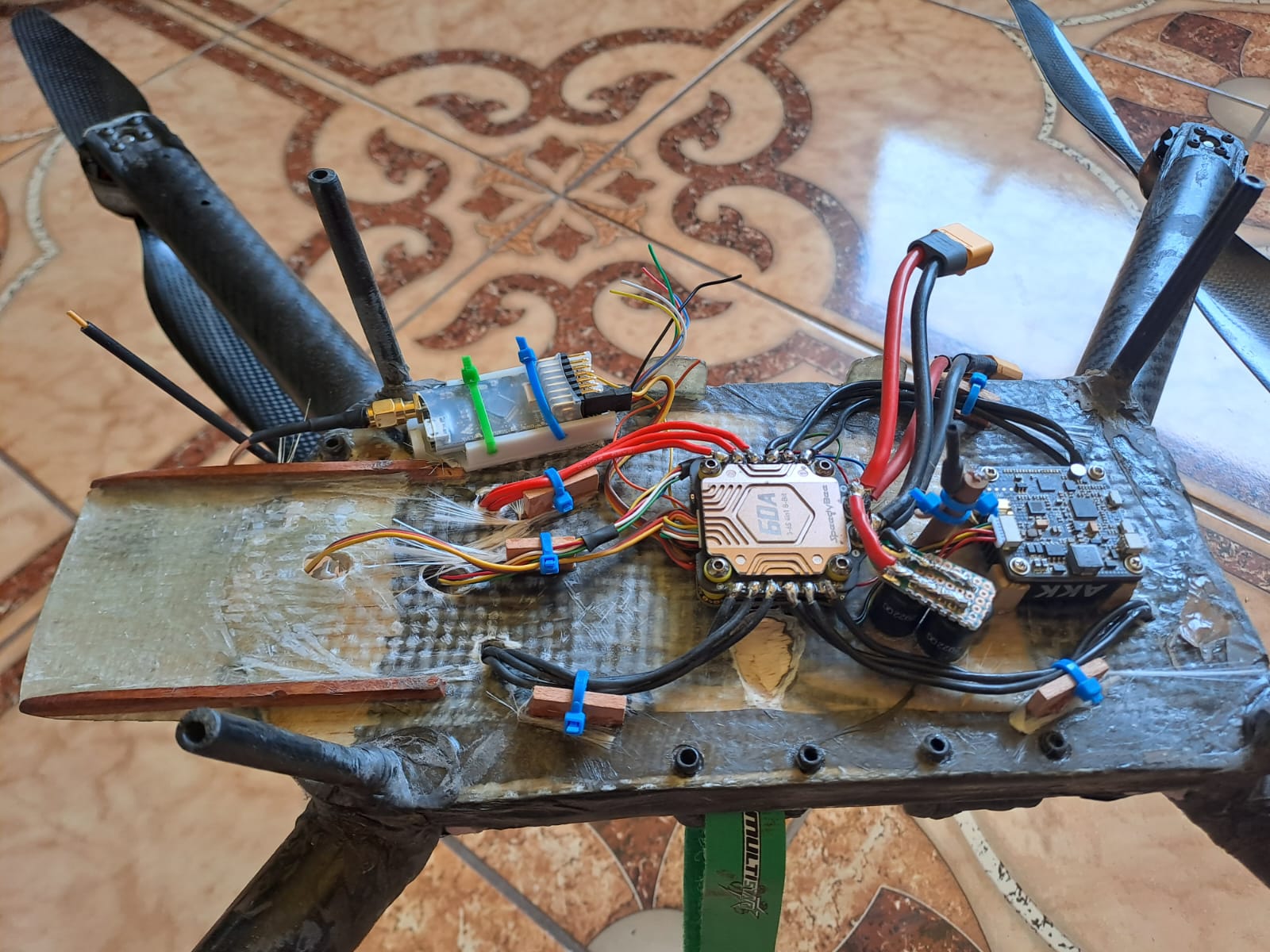
I am struggling with setting up a larger copter (3 kg) with 16 inch props…
I started a similar topic in Ardupiloot configurator, but was not able to progress at all there, so I decided to post a new topic here.
I have got several issues, some which may be related to my particular setup and built, and some may have uncovered underlying ardupilot problems.´
So to cut the story short, after long trial and error, I was able to setup PIDs which made the copter quite flyable with some caveats (I will come back to this point later), but they are almost the double of the PIDs obtained by Autotune.
The problem which seems not to have been solved in arducopter is this: I have made several flights with different weights and at two different altitudes. I analyzed the logs with Ardupilot PID tool, and got the following:
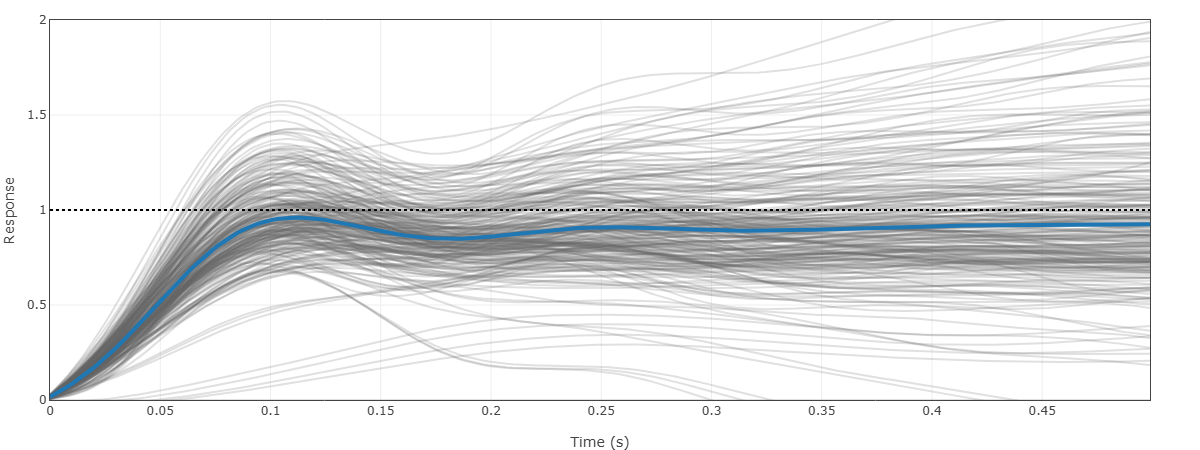
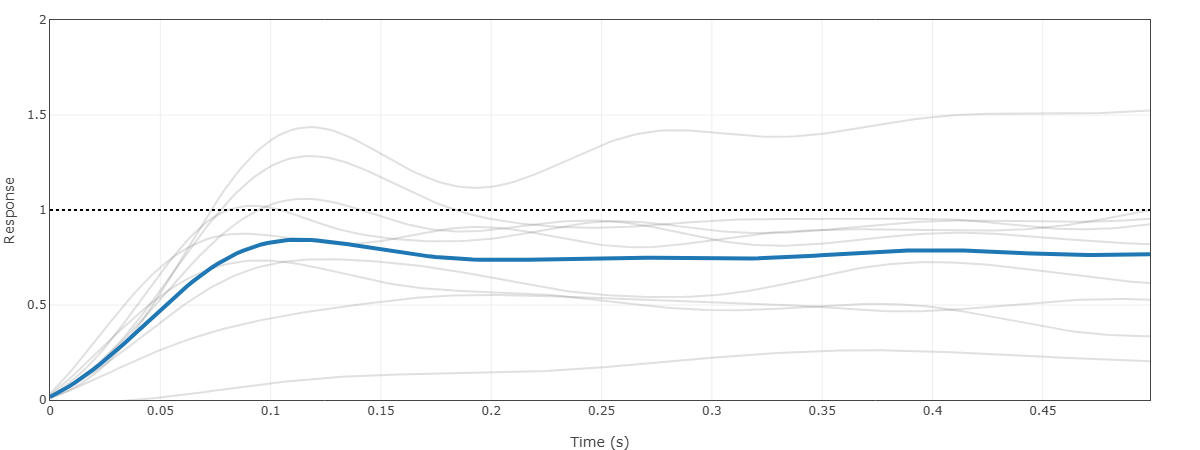
Step response for Pitch at 2450 grams:
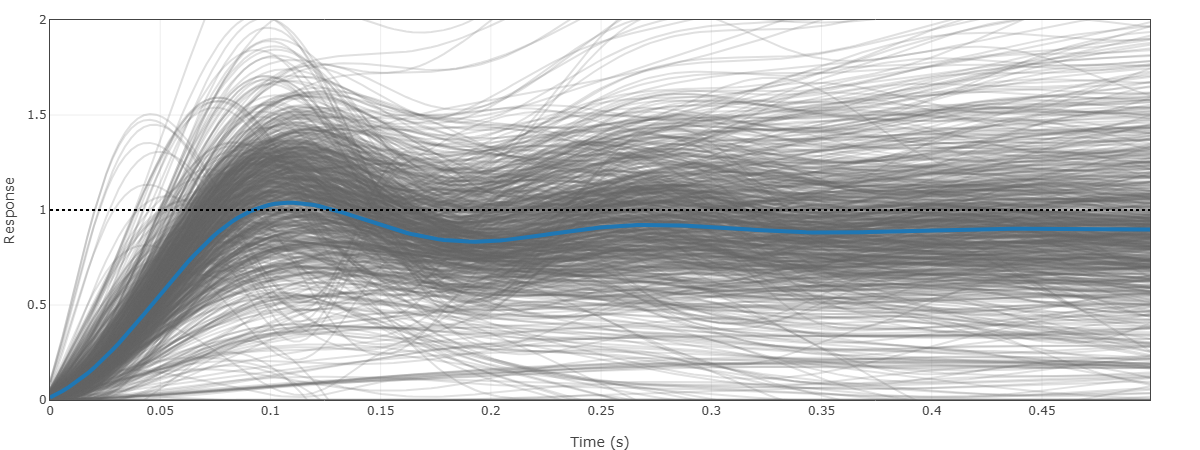
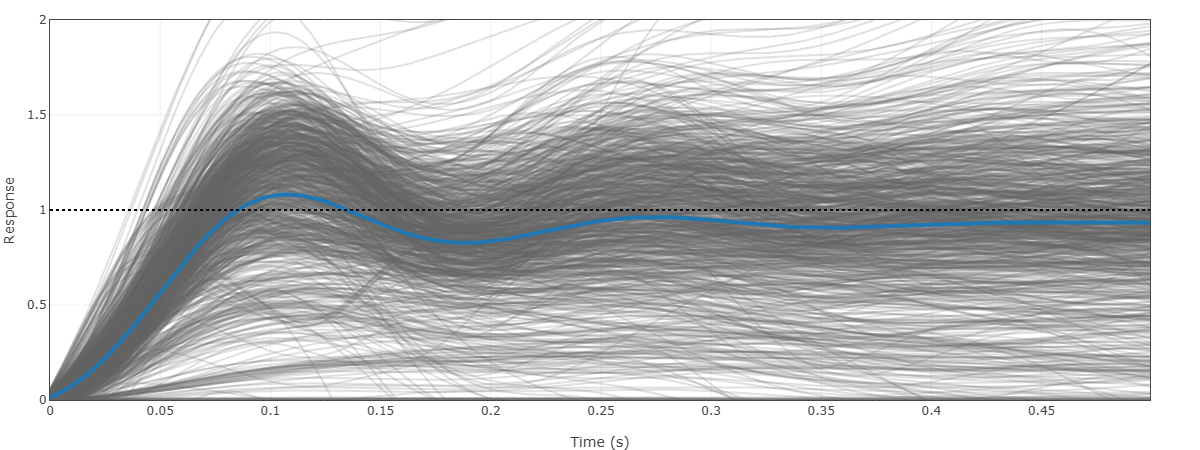
Step response for Pitch at 3150 grams:
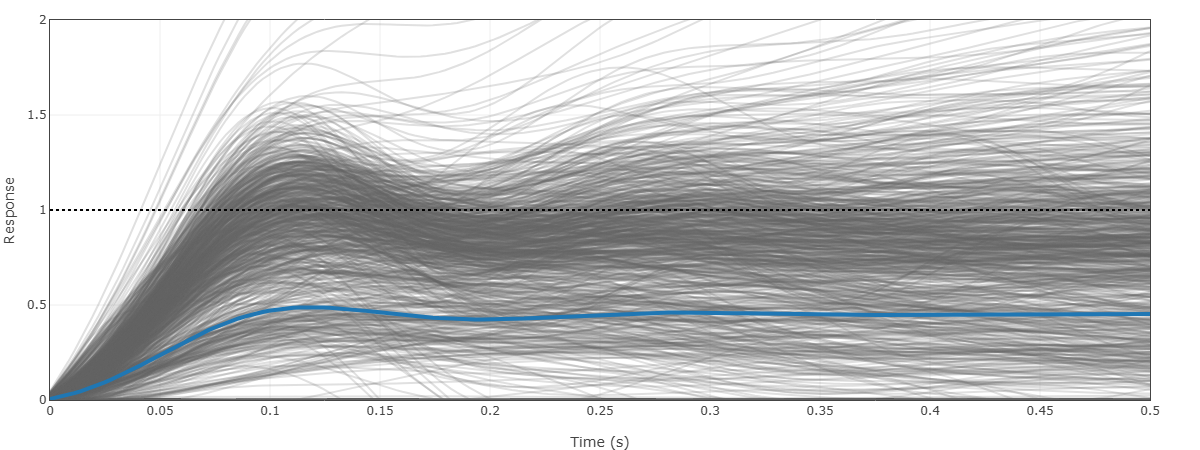
The first graph is basically a very flyable setup, I need to work out a slight tendency to have minor oscillations.
The second graph can be flown, but is quite unstable. So the PID values which are fine for a certain weight make the copter almost unflyable when the weight is increased by just 27 %.
This is a minor problem, because you can adjust the PIDs on ground based on the expected battery weight.