Help! I’m about to go crazy trying to tune my modified Robomower RL500 with a Pixhawk 1, Sabertooth motor driver and F9P RTK GPS. I believe I have the turning tuned pretty well (PID desired ~ PID Achieved) and also for throttle. It functions appropriately in Manual and Acro. I think my issue is I can’t sort out all of the inputs for the auto course (PSC_POS_P, PSC_VEL_…, ATC_STR_ANG_P etc.) I’ve gone back to square one, re-tuned and followed the instructions on the Ardurover site without success.
How do I get help? Attach a log and parameter file and wait for some to come to my rescue?
Thanks,
Chuck
Yep, a log file would be useful, plus a description of the behaviour you’re seeing in AUTO mode.
1 Like
Hmm, I’m having difficulty adding my tlog here, it says it’s bigger than 4.4 MB but it’s only 2.4 MB. Any suggestions? Is my large image of the rover above considered part of the 4.4 MB?
Thanks
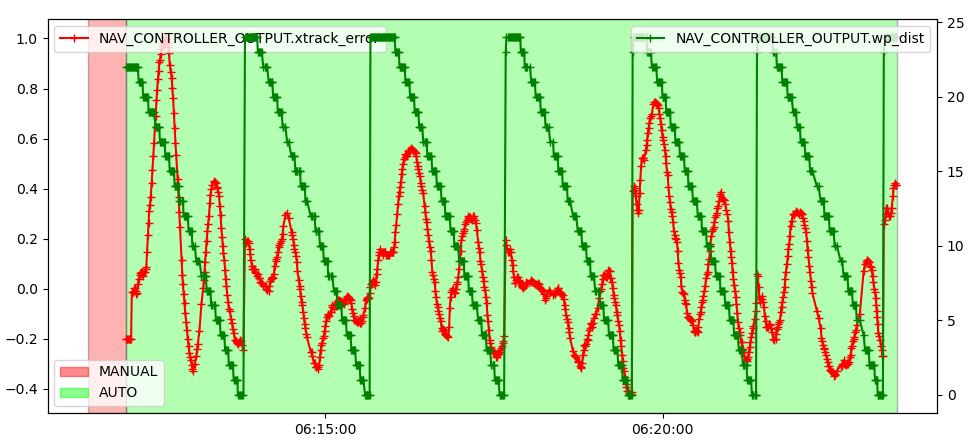
The following plot shows the waypoint distance and cross-track error:
Looking at your parameters, I not that you’re only using the internal compass on the flight controller? I’d recommend looking into an external compass module (on a raised platform, similar to your GPS module) to reduce any magnetic noise from the flight controller.
Given that you’ve got the vehicle working well in ACRO mode and the overcorrection in AUTO mode, I’d look into reducing PSC_VEL_P from it’s current value of 0.25 to 0.20 and seeing how you go.
EDIT:
A copy of the bin log on the flight controller’s SD card will give more compete information.
Thanks for your input. I do have another GPS/Compass that I could add, so I’ll try that along with reducing PSC_VEL_P. I’ll also download the bin log.
Thanks again,
Chuck