Looking pretty good. Try increasing Increase Ange Max and Loiter acceleration max. Some of those speed bursts in Loiter are hitting the max angle.
1 Like
You may want to consider install a downward rangefinder and configure the EK3.
We did experienced that for a small quad running 4.0.7 firmware.
Hi @dkemxr,
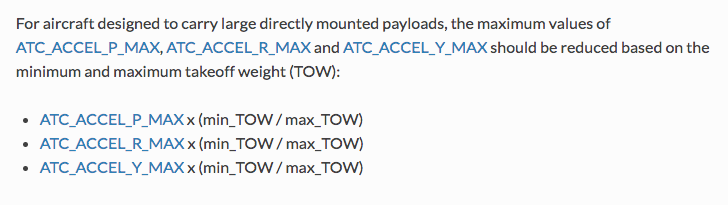
I did a number of flights in the two weeks setting different loit angle and accel values. I had great results at 20 degrees angle max. The next step is now to add the payload of 2.8 kgs approx. for parcel delivery. For this I lowered the values of accel max as suggested for variable payloads.
The overall flight performance was great. I achieved a hover flight of about 40 mins with 12S1P configuration 30000mAh batteries. I ll try to upload the log of a shorter flight as soon as weather clears up.
I once thank you @dkemxr and @xfacta in helping me tame this beast. Your input in this has been a great help.
1 Like
Downward range finder is helpful indeed but copter will fly at high altitudes 500 to 1000m.