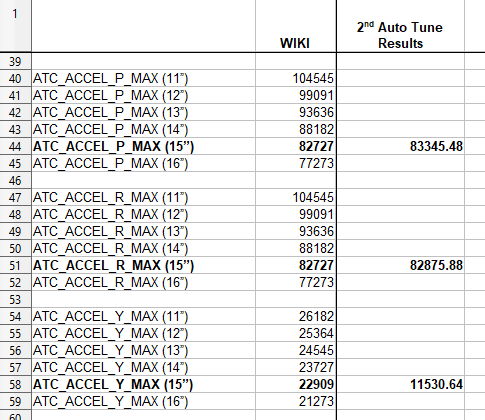
Following the wiki Initial Tuning Guide to the letter, I interpolated the ATC_ACCEL_(P/R/Y)_MAX parameters to determine the initial values for my 15" props.
I had a failed 1st auto tune due to a bonehead parameter entry mistake on my part - but the 2nd auto tune worked well.
The pitch and roll values for the ATC_ACCEL_(P/R/Y)_MAX parameters were very close - but the yaw was quite a bit different.
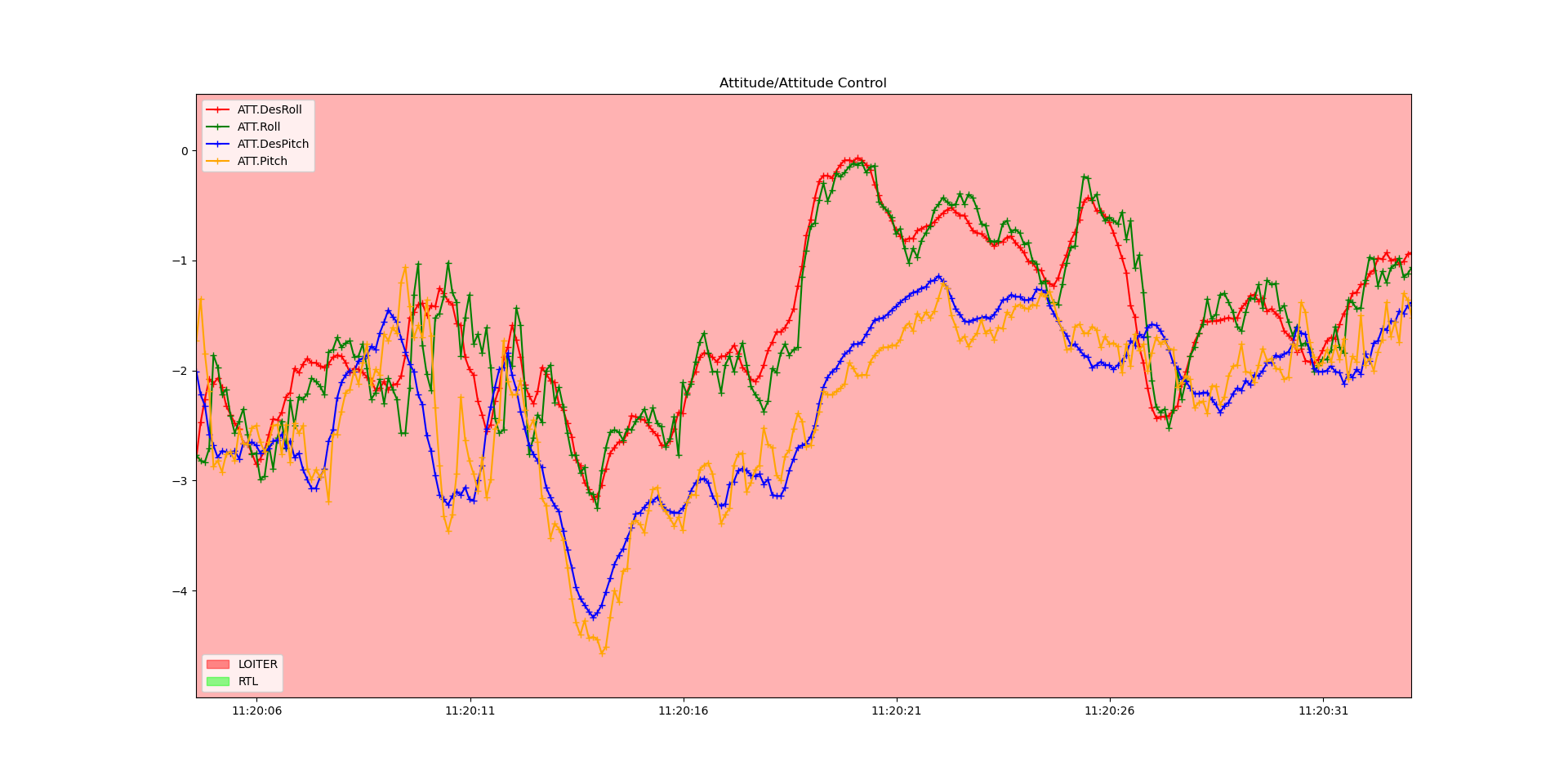
On the test flight I conducted after the auto tune, I found the copter really well behaved - with no observable oscillations in flight. The MavExplorer Attitude graph however, does show a little bit of jitter when in forward flight at a constant altitude.
On the landing, the copter was pretty steady on the fast landing segment with only very minor visible and audible oscillations. The MavExplorer attitude graph displays this:
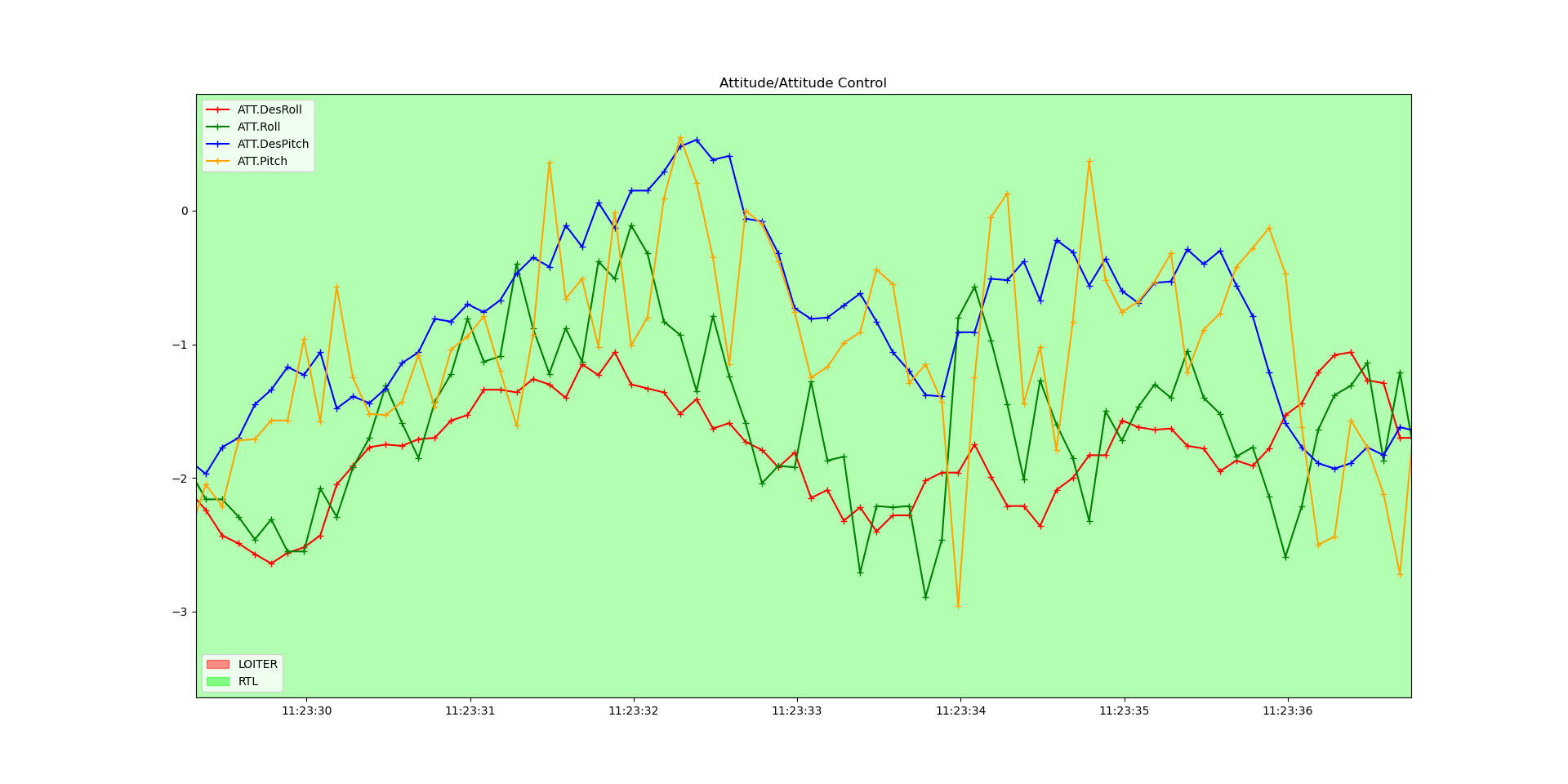
Is it possible that changes to ATC_ACCEL_(P/R/Y)_MAX might improve this aspect of the tune?
Many thanks!
As info - this is a 690-class quad with a very high thrust-weight ratio.