dkemxr
November 24, 2020, 2:20pm
21
The Notch filter results look good. Now disable INS_LOG_BAT_MASK (0) so your subsequent logs are not gigantic like your Autotune log is.
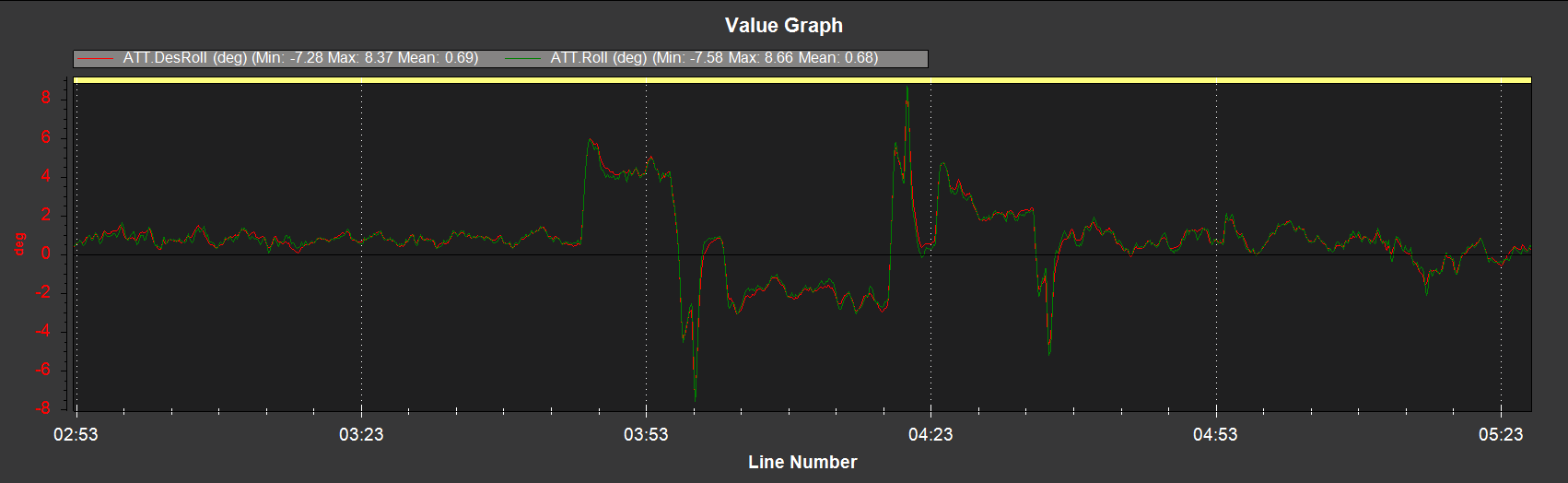
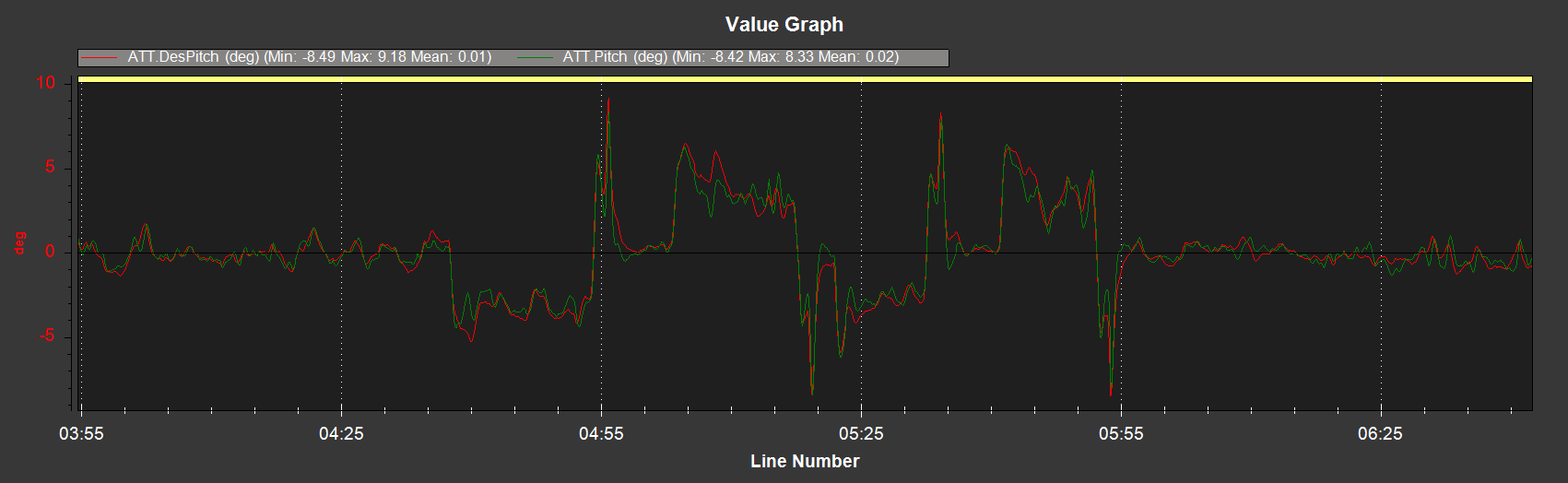
It’s pointless to do an Auotune when it’s windy and I see no evidence it was successful. Compare the PID values for yourself.
When posting logs for inquiry don’t post the Auto tune log. Make another flight after Autotune has succeeded and post that one. .
2 Likes
Thank you for your advice and sorry for the trouble.
1 Like
hosein_gh
November 24, 2020, 6:26pm
23
could you tell us more about wind ? was it spinning or it was in one direction ?
@hosein_gh , yes indeed there was a spinning wind.@dkemxr , I attached the logs by setting the log parameter as you suggested.https://drive.google.com/drive/folders/1UjDWe2AyI736zP-OczWLajgrdAN6zSxy?usp=sharing
1 Like
hosein_gh
November 25, 2020, 9:19am
25
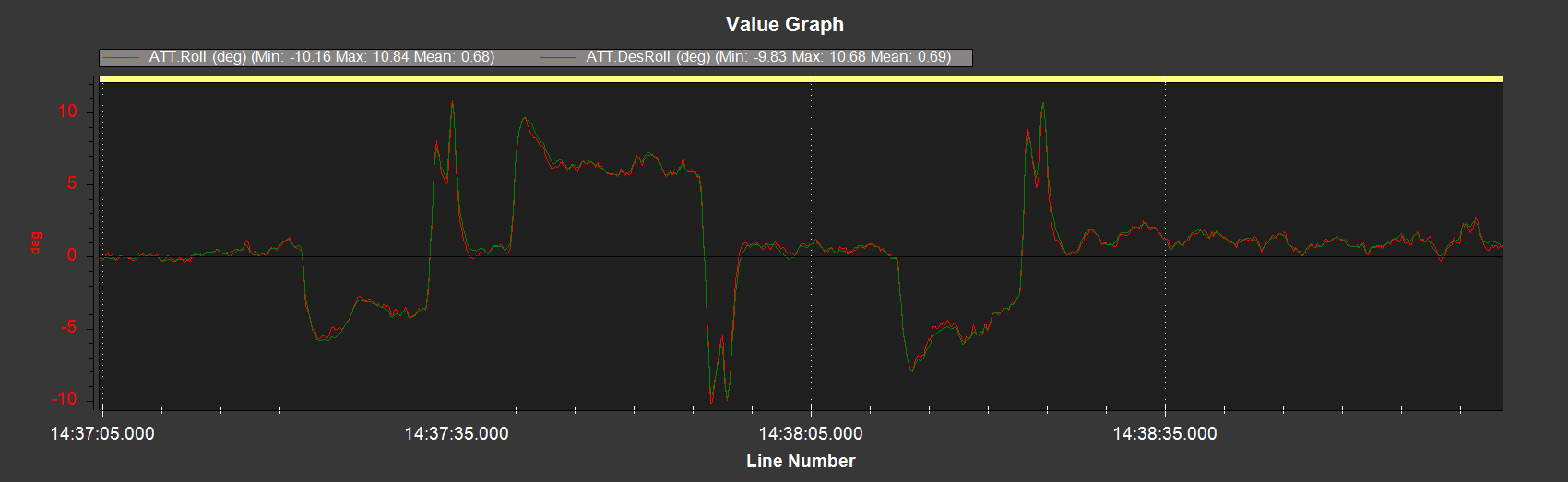
your tune is now much better
but i think it could be better ,first save all parameters with mission planner then try to run autotune again only on roll and pitch with AUTOTUNE_AGGR = 0.1
1 Like
@hosein_gh , thank you so much for the quick look.
2 Likes
hosein_gh
November 25, 2020, 1:55pm
29
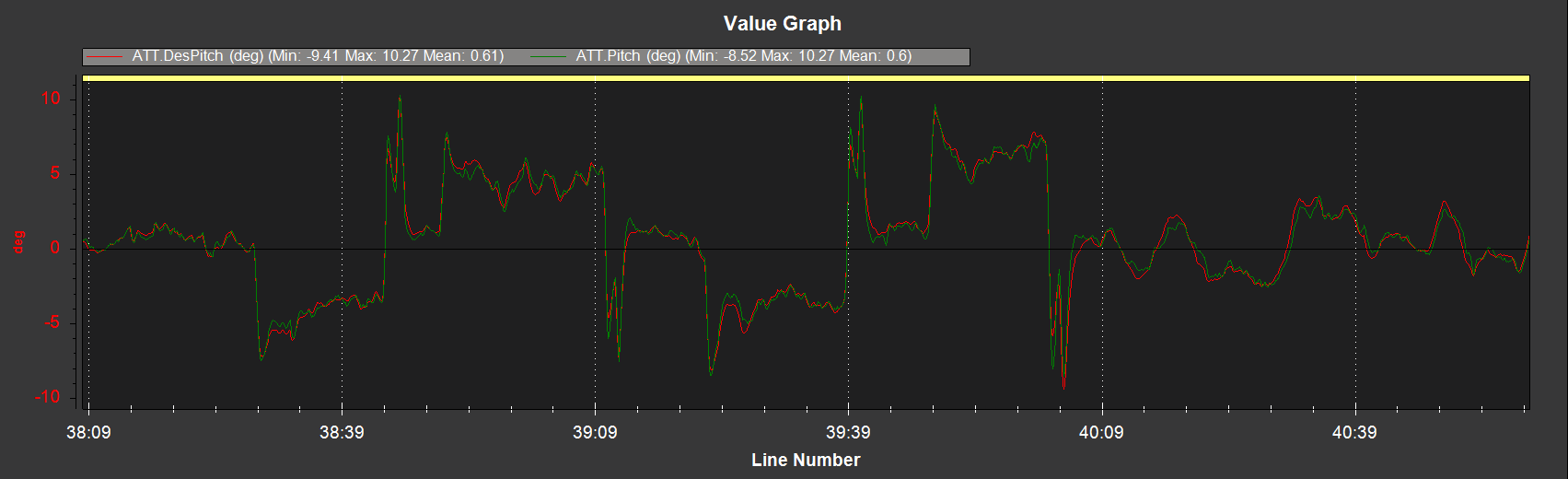
OK looks good
but better result on pitch
its could be better with some manual tuning but for a 24.5 inch copter its good enough
1 Like
Hosein, thanks for all of your efforts.
Can I ask what the final PIDs were? All the log links seem to be not broken
A7sus4
December 8, 2022, 9:53am
32
@Mustafa_Gokce Yes, could you please re share your final PID values? All your links are broken.