Looking pretty good. Yes, I agree that ATC_STR_RAT_FF should go even lower. I think maybe as low as 0.33.
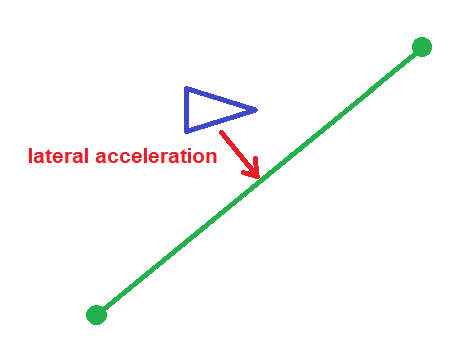
Re ATC_TURN_MAX_G (aka “lateral acceleration”) this limits the output from the high level navigation controller (aka “L1 controller”). The L1 controller outputs an acceleration back towards the line between the waypoints. lateral acceleration is then converter to a desired turn rate (using the vehicle’s current speed).
I wouldn’t reduce WP_OVERSHOOT too much. It maybe seems like it would help improve accuracy (and it might) but setting it too low tells the autopilot to reduce forward speed if the vehicle strays more than this distance from the line. So if WP_OVERSHOOT is set too low then the vehicle will end up slowing down all the time.
By the way, after you get your vehicle driving well, if you’re interested we have an S-Curve enhancement that I need help testing (I can provide a binary for your autopilot). No pressure though of course.