Hello,
I build a 3d printed frame 22 inch quadcopter 5kg empty, 14kg auw and like to ask for tuning advice.
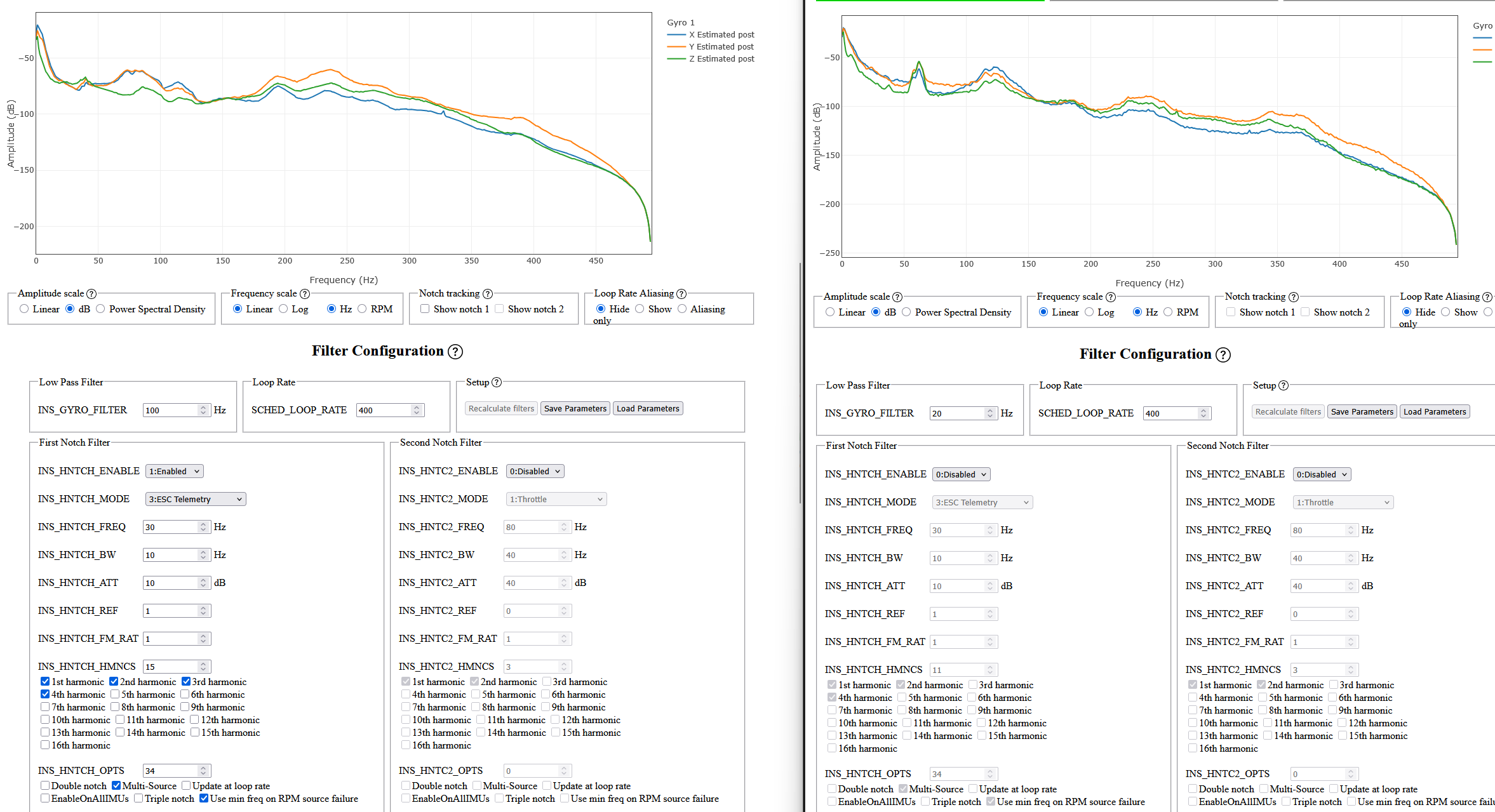
I don’t have a lot of vibrations so generally just INS_GYRO_FILTER set to 20hz is enough to keep the vibrations lower than -50db, but If I use RPM notch filter I can set INS_GYRO_FILTER to 100hz and have also same -50db noise.
Which way is preferred?
Any tuning advice are also welcome, Is current setup OK for autotune? Or should I try to tune PIDs manually?
bins are here