Hi all,
I am trying to install a maxbotics i2c ultra sonic sensor onto my aircraft. I am running a cube with the 3.6.5rc2 firmware
I am already running a lightware SF11c lidar as my downward facing range finder, so I am putting my i2c ultrasonic sensor into my RNGFND2 Params, I have it all set up correctly but am not getting any return values from the SonarRange value in the status menu.
I dont know if I need to set the RNGFND2 address to a value and if so, what should it be?
My range finder is set to address 102, so I can’t use that.
I am connecting these two plus an optical flow sensor to an i2c splitter on my aircraft, the range finder and the optical flow both work fine.
What orientation have you set ?
Generally we set one facing down (25) as it it default and output values to ‘‘sonar range’’ on Mission Planner. The other(s) rangefiner or sonar must be facing other direction like “0” for forward and the values can be seen when you do CTRL-F and click on Proximity and you will see the distance showned on a “RADAR”
I am reading through that link, I somewhat understand what Randy is saying in it, but I don’t understand how to configure the UltraSonic sensor to set avoidance.
@ppoirier I can see in the proximity radar that the sensor is indeed working, it reacts to objects moving in its field of view… so that’s good, I just am not sure how to set the avoidance? that link doesn’t really tell me what I need to alter in the params to make it recognize and avoid
that was more helpful, thank you.
I have one more question, In the “PRX_TYPE” param, if I set that param to 4, is it also going to set my SF11 Range Finder as a proximity sensor? I don’t want to do that. I just want the forward facing maxbotix to be the prox. sensor. I want to keep the LIDAR acting as altitude measurement and keep avoiding terrain.
Ok I don’t want my lidar to be used as a proximity sensor.
I tried setting it up according to the wiki but it still won’t stop before impacting objects =/
I’m flying within a meter of them and it wants to continue on when I have the avoid behave
param set to STOP.
I’m not sure what I am doing wrong.
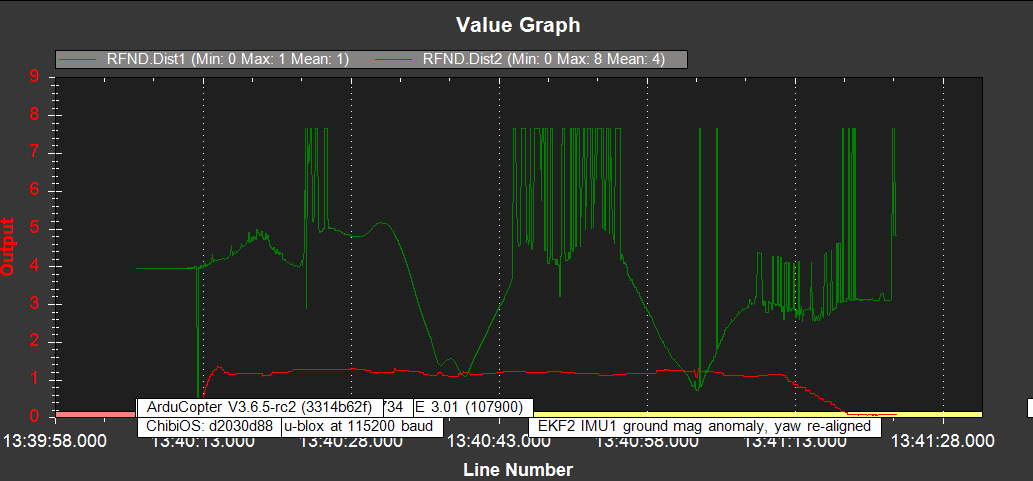
Can I have you take a look at this log for me? maybe you can see what I have done wrong or haven’t properly set up. Thank you in advance
I dont think you can make a good avoidance with such a signal, you should try with a TFMINI RangeFinder , it is the same price range and it works great
Is there any easy way to update the TFmini? It doesn’t have a usb port or anything, so i assume the pixhawk can passthrough the update through the serial port?
I am using a mini carrier board for my cube, so i am unsure yet which port I can use for this lidar.
ok thats good to know, do I need to set the PRX_TYPE to 4? or can I get away with not touching that param since I don’t want my downward facing range finder to be a proximity sensor?