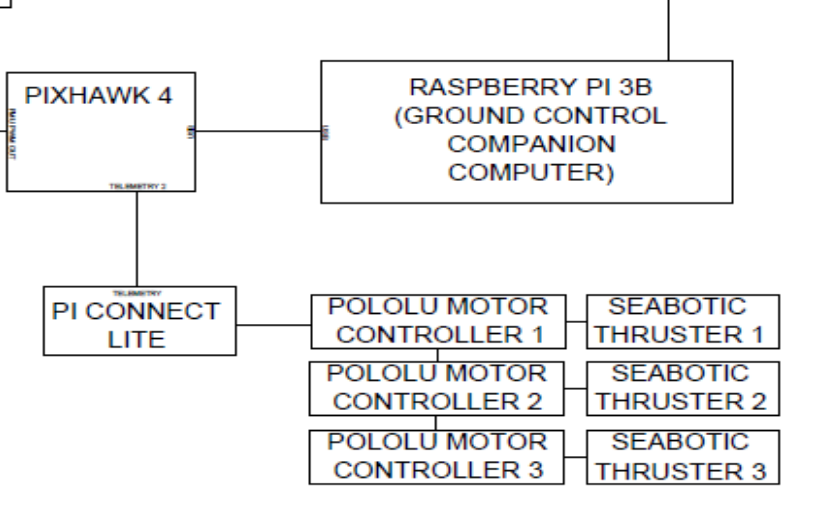
We are currently building a Underwater vehicle which is operated from the ground side. Through a tether cable from the laptop side connected to a raspberry pi 3B. From here the Raspberry Pi is USB connected to the Pixhawk 4. Now I am trying to establish a direction connection between the Pixhawk 4 and the Pololu Simple Motor Controllers.
A link to the motor controller below:
Our current proposal is to connect the Pixhawk 4 through Telemetry 2 to a “Pi Connect Lite” which is then Serial TX/RD connected to the Pololu Simple Controller. However, we suspect that the Pixhawk 4 may not be able to detect the motor controller this way. What methods/workarounds can we explore in this situation?
why don’t you just use the RC PWM input the pololu motor controller provides?
And using the USB port on any flightcontroller during operation of the vehicle is not recommended. USB ports are not vibration/mechanical resistant. The cable might shake loose or the connector brake from the PCB.
I am not too familiar with RC channels, in this case, would there be an RC transmitter connected to the Pixhawk 4 and the receiving being the RC PWM input to the Pololu Motor Controller?
If we are using the Power Management board (connected to Pixhawk 4) to output the PWM signals, I assume can connect the signal pin directly to the RC input signal pin. As well as power and ground the other two RC pins and there should be a direct communication with the Pixhawk then?
Use only signal and ground between the Pixhawk 4 power management board and the motor controller. The 5V supply of the motor controller is just powerful enough to power an RC receiver. If you connect something else, like a servo, to the Pixhawk 4 it might draw to much power and damage the motor controllers 5V supply.
If I am understanding it correctly, I would need a RC transmitter/receiver pair, with the receiver connected to the motor controller, and the signal/ground connection between Pixhawk 4 Power Management Board with the Pololu Motor Controllers RC PWM pin/ground?
EDIT: Can the receiver be connected to the port pins on the Pixhawk 4, if compatible?
You do not need a RC transmitter or receiver. RC servos and ESCs are controlled by PWM signals. Autopilots like the Pixhawk 4 are meant to turn common RC vehicles into autonomous ones. So the Pixhawks servo outputs use the same PWM signals as a RC receiver.
The Pololu motor controllers can also be controlled by a RC PWM signal.
The servo outputs of the Pixhawk 4 are located on the PM07 board. Please refer to the Pixhawk 4/PM07 manual.
Connect the servo outputs to the motor controllers RC inputs with a signal and a ground wire and the Pixhawk shoukd be able to control the motors.