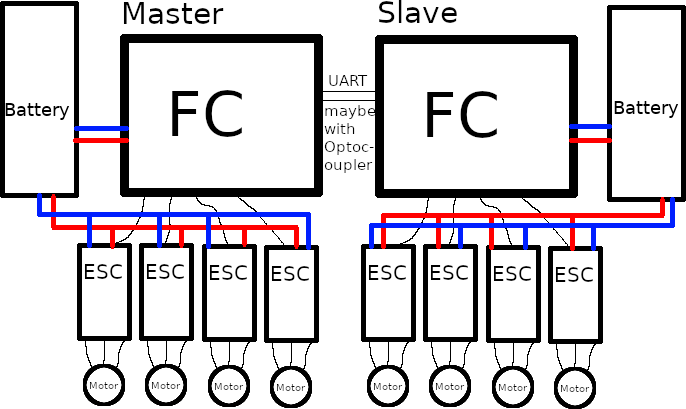
I need good redundancy for my uav is it possible to have two redundant flight controller where one is slave until the master fails, each FC has it’s own sensors and RC-Link, and it controls 4 of the eight motors of an octocopter, where four motors are enough to safely fly the uav. This setup would allow failure of every single component, if one battery fails the other FC can fly the uav alone, same with the FC.
Take a look at ArduCopter standby flight mode and documentation
1 Like