Not sure if this is the right spot to post this.
I am having trouble getting my new tricopter to take off. When I throttle up for takeoff, the tricopter pitches back to such an extent that I need to move my pitch control stick all the way forward to stop it from flipping back.
I am using a Pixhawk 4 Mini running the stable PixhawkMini version of Copter from here: PH4-mini
I have completed the initial setup and calibration steps in mission planner with no errors.
Here is a screenshot of the horizon from Mission Planner.
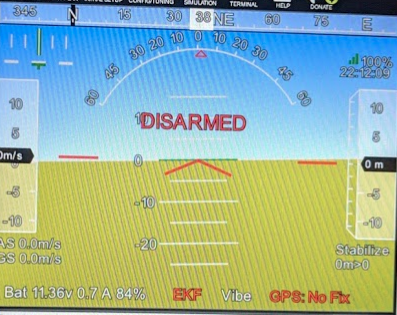
As you can see, it is reading (mostly) level.
How would I go about debugging this?
Let me know if you need any more info about my setup.
Cheers.