Hi all,
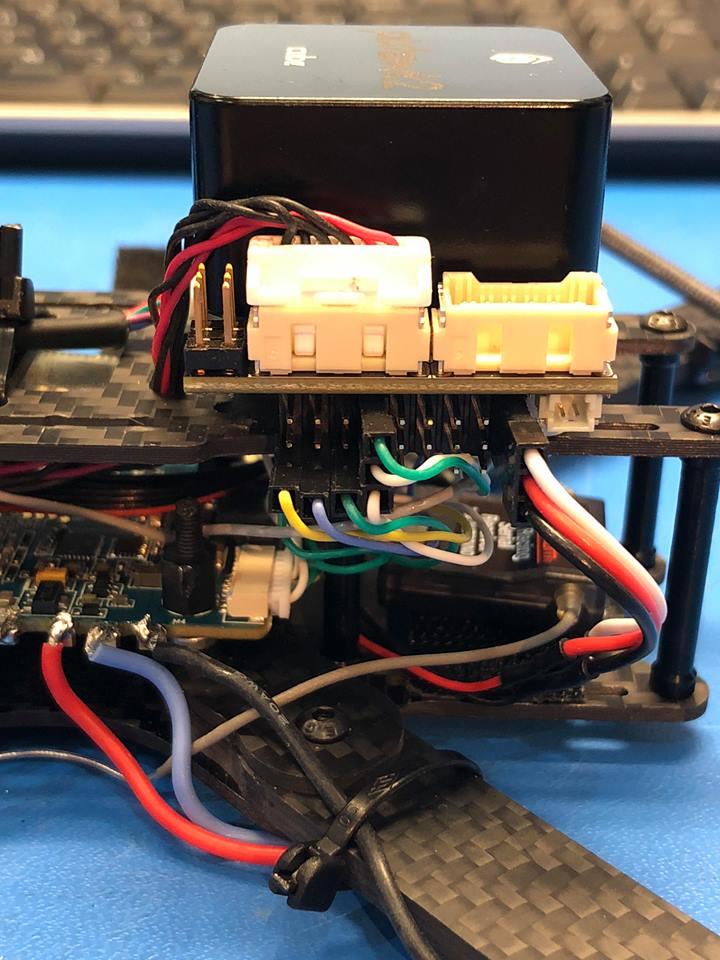
I am in need of some help, I just finished building my second quadcopter which is running the 2.1 ProfiCNC cube on the Mini carrier board
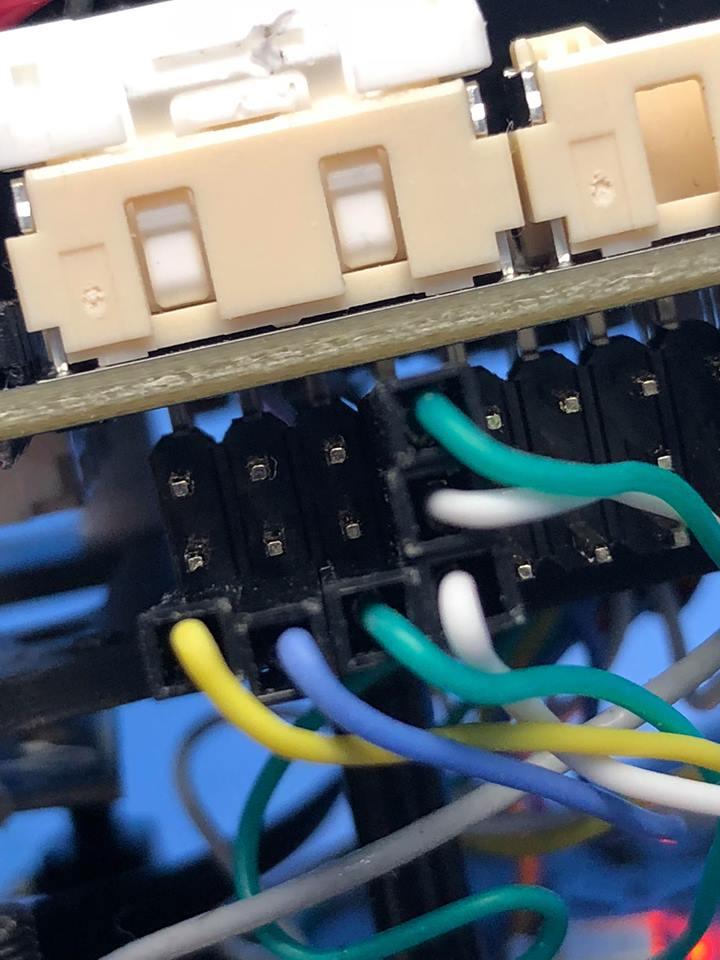
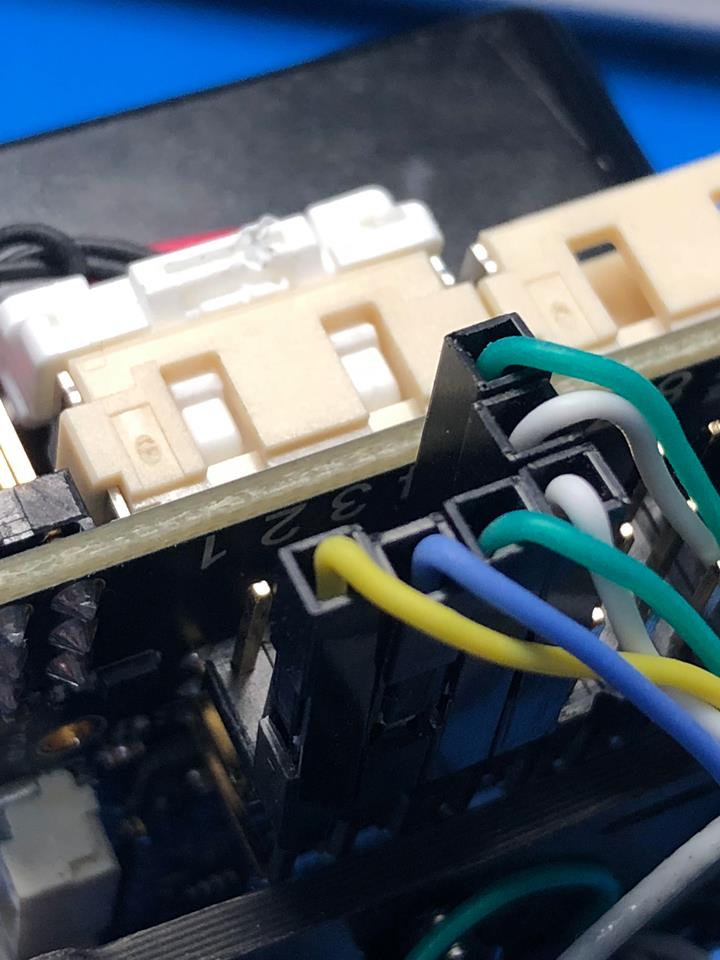
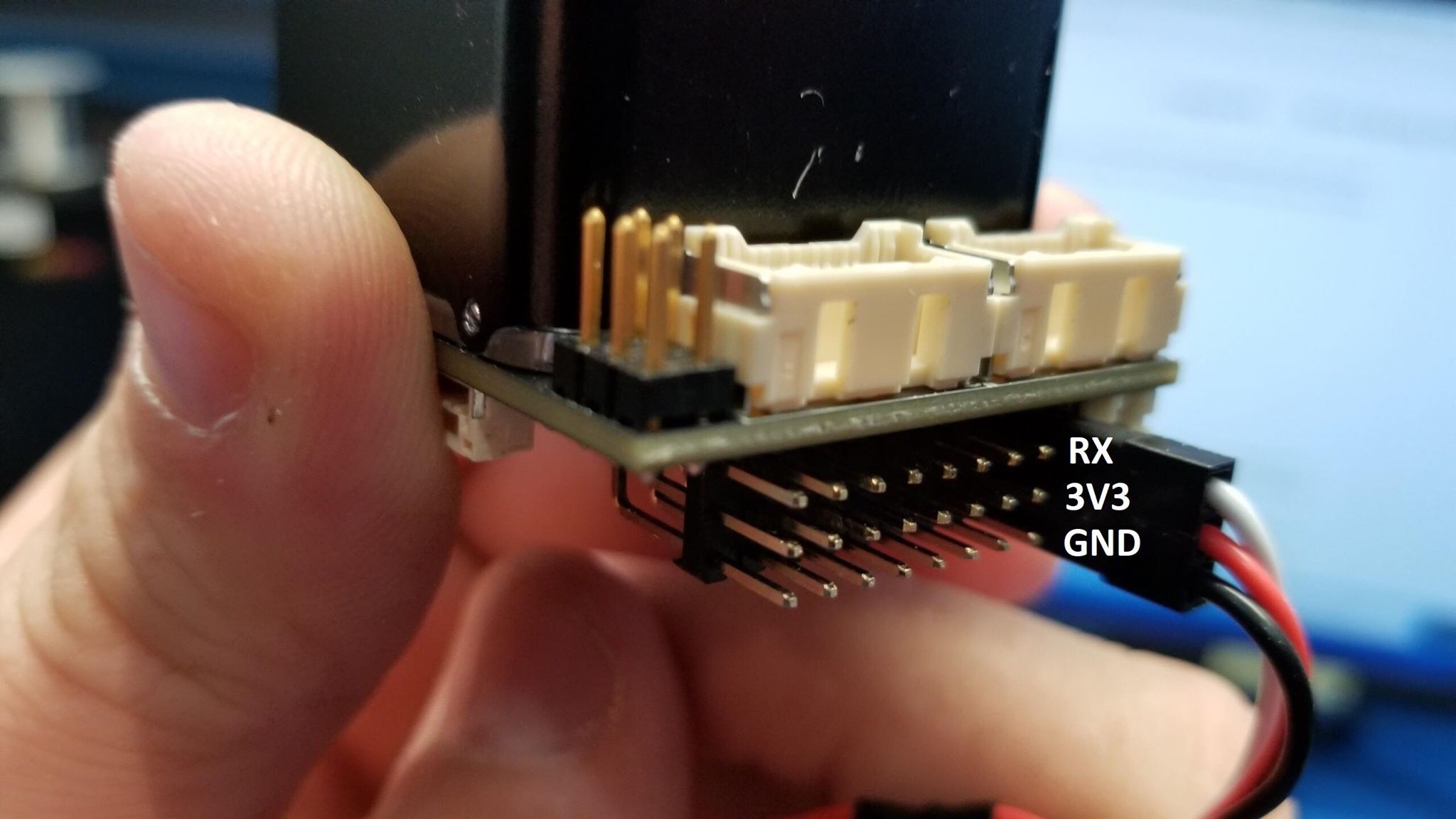
I am running APM copter 3.5, and a 4-1 BLHeli 35A ESC and using a Spektrum DX9, with a Here2 GPS, I have my ESC plugged correctly into the Main ports on the mini carrier board (I followed the layout of the full size carrier board that the cube came with) and I have all 4 motor signal wires to the signal pins, and the common ground and 5V on the correct rails to my knowledge.
The problem is that I cannot get the motors to spin when they are armed, I also cannot get them to spin while testing motors with Mission Planner
When I try to calibrate the motors, after powering on with the throttle high, the GPS lights go into the regular blue and red flash, I unplug the battery and plug back in and then press the Safety Switch to begin the calibration process, but the motor’s never make any sound after pressing the safety switch and they don’t go through the calibration no matter what I do.
When I arm the motors with the TX, the GPS goes solid green indicating that it is ready, (again, after pressing the safety switch) but the motors never spin when I throttle up
And when I attempt to test the motors on Mission Planner, the same thing happens… the copter arms but the motors dont spin
The thing that gets me is, the GPS flashes red and blue when I try to spin the motors, and then it goes back to green but I never get any kind of an error or warning on MP at all, it just acts like nothing even happened.
I also have no other warnings at all, although once or twice I did see the word “SAFE” come up on the main screen of Mission planner near the instrument panel (the horizon panel) but it disappeared quickly and I did not see it again.
Hopefully I have explained this clearly and somebody can give me an idea of what to check, I’m definitely lost here…
Thanks!