Hi Fellow Ardupilot Users:
I’m new to this forum and have followed a number of the queries and guides pertaining to optimizing flight controls and behavior, but I haven’t been able to successfully apply these to my helicopter.
Although the system appears stable, I get occasional oscillation and poor disturbance rejection. There are times when the attitude desired and feedback are several degrees off (5-10deg), and the rate loops can be >20deg/s from where they need to be. It’s unclear what limitations come from the hardware (stiffness of the tail, damping of the head, dynamics in various flight modes, vibration) and what level of performance I can fundamentally achieve.
It would be really helpful if someone could review my Dataflash logs and provide insight into where the tuning can improve and some recommendations for tuning next steps.
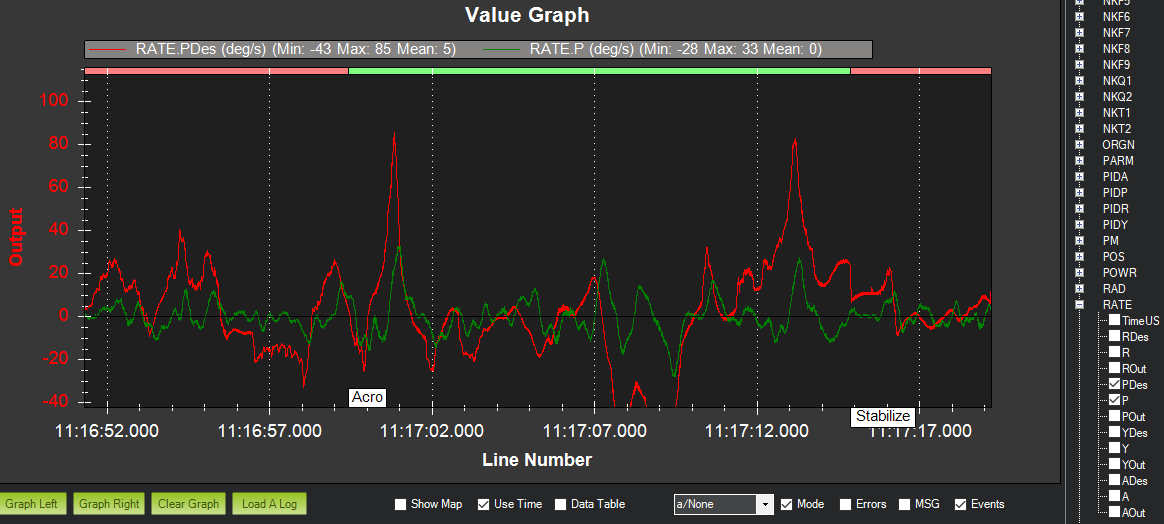
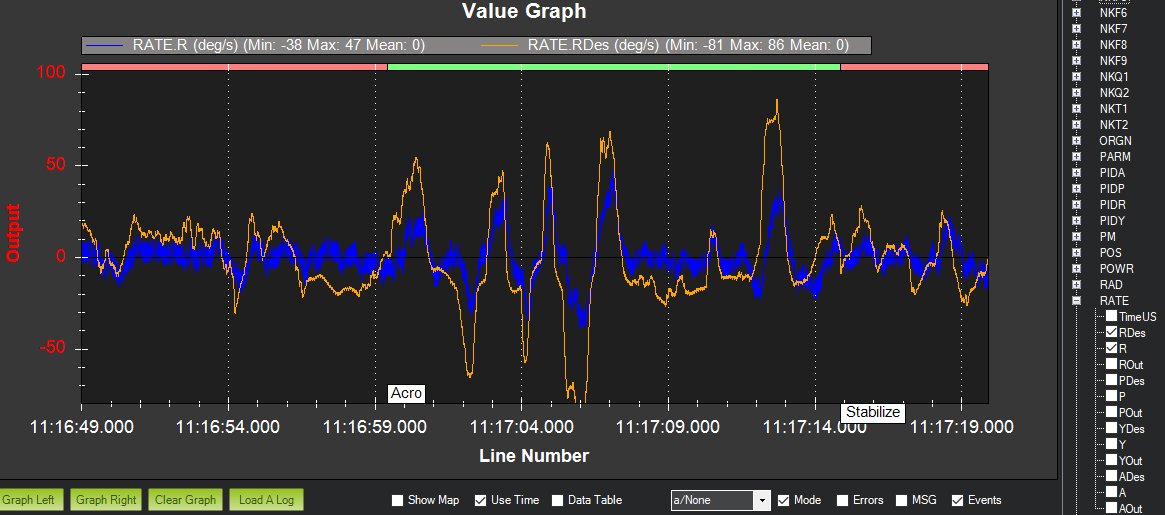
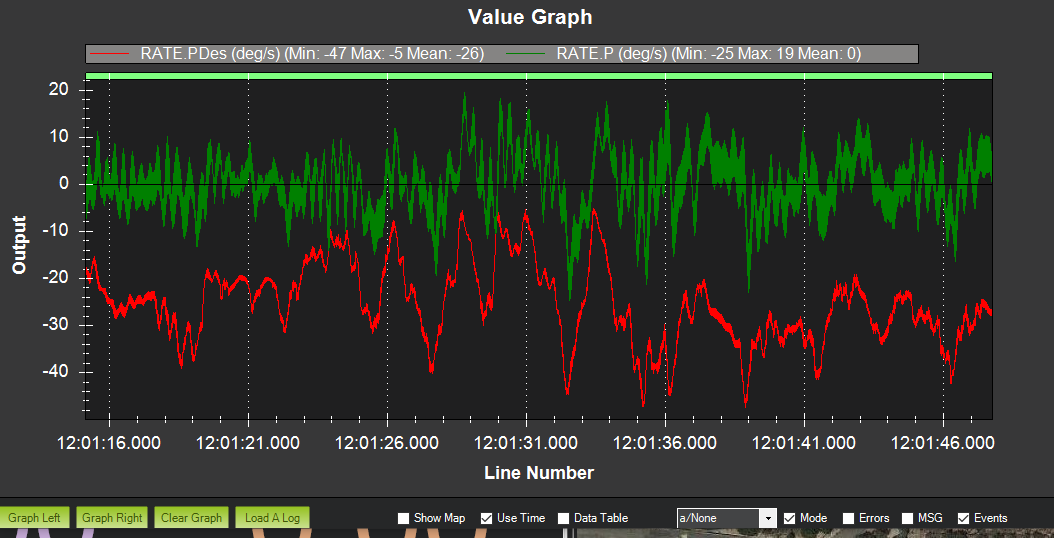
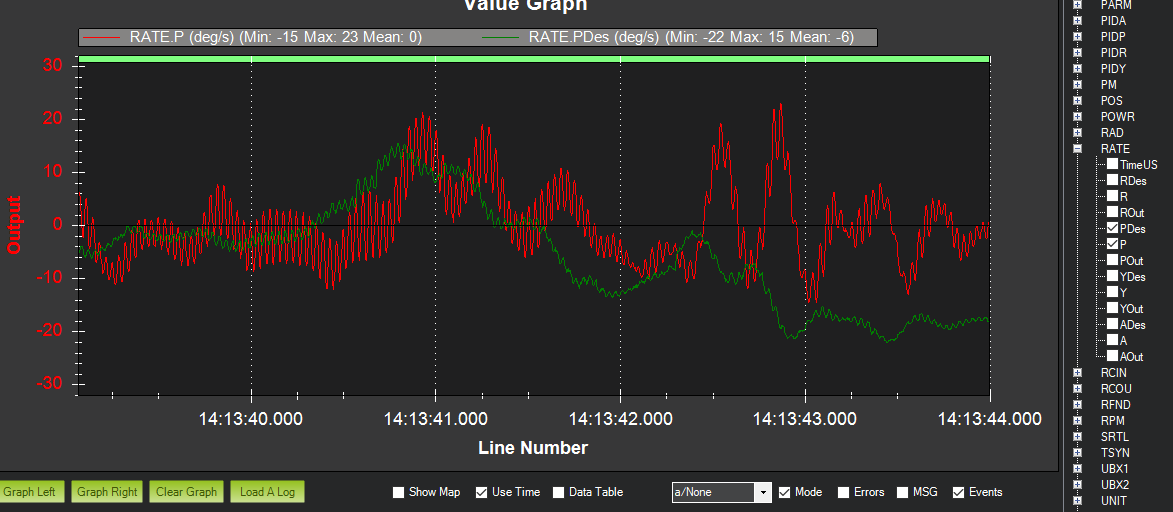
I’ve highlighted some examples of how far off the command and response can be at the rate loops. To try and address these gaps, I’ve increased P/D gains at the ATC_RAT loops up to the point of instability, without success. I’ve tuned the corresponding filter to reduce vibration impact. I’ve tried to add integral gain and increased IMAX to see if I can counteract this offset with no success.
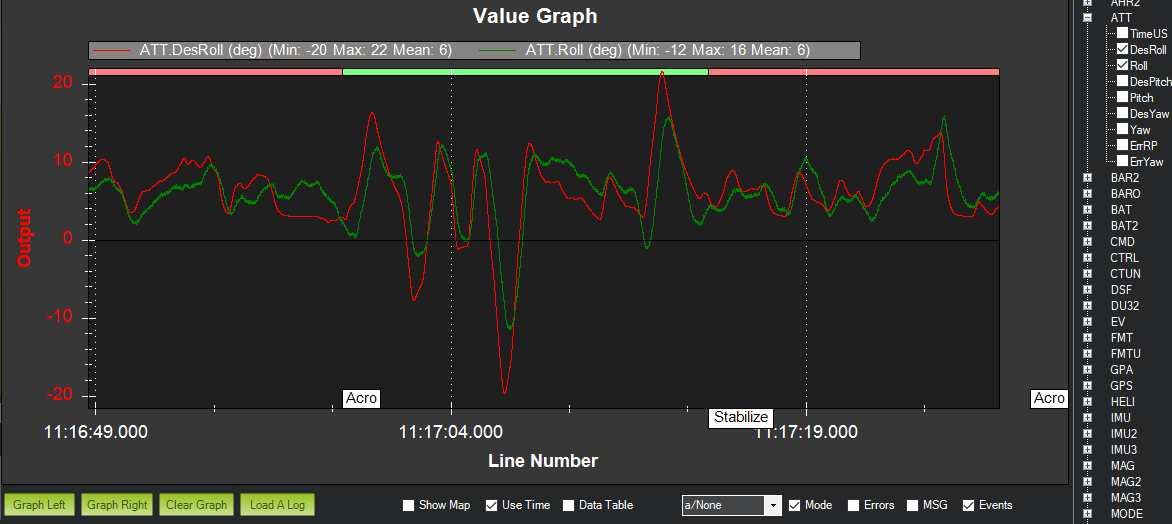
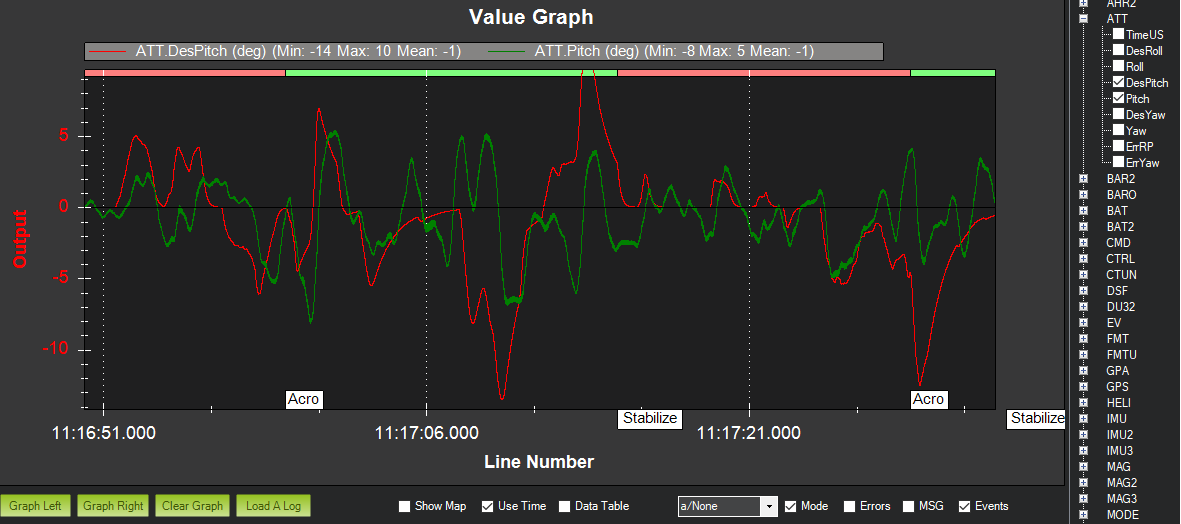
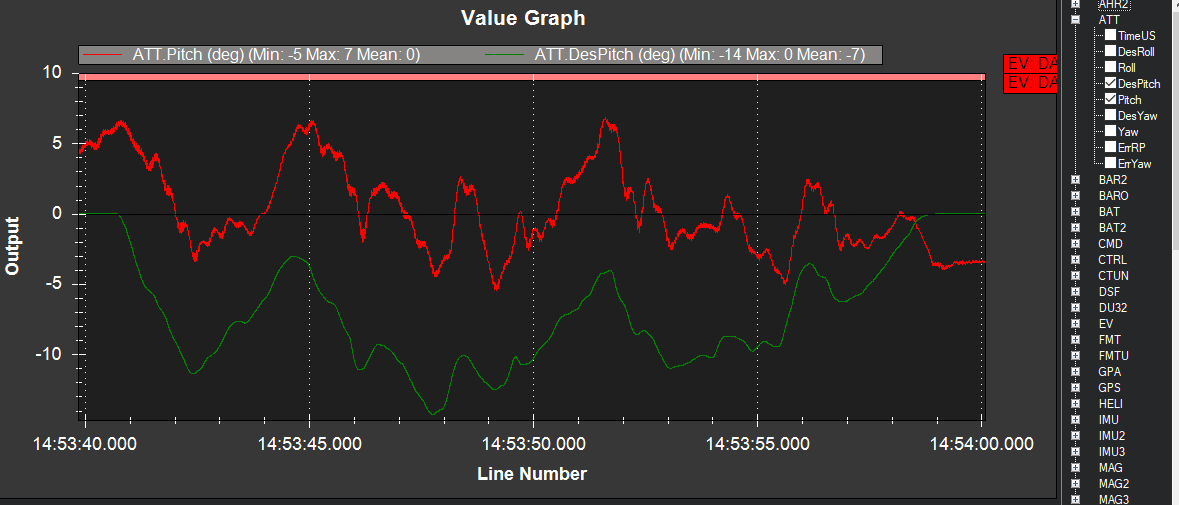
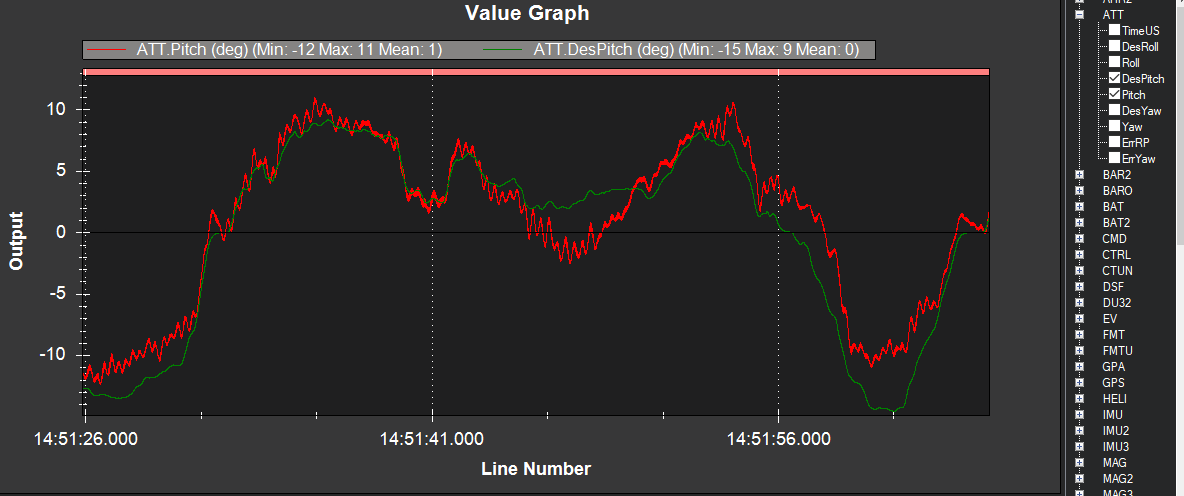
I’ve highlighted some examples of how the attitude controller also exhibits offsets. Sometimes it looks great, sometimes there are huge gaps. The stabilize proportional gain doesn’t seem to do much.
You can download the Dataflash log here.
Some basics for the configuration:
AP Copter 3.6.9
Running PX4
Dataflash log is 25MB, so link attached. Please let me know if there’s a better way to share.
Direct drive tail, SAB head with large meter long blades
(More details as requested)