Setting up a new plane. I used this as my guide to get the correct servo throws. https://ardupilot.org/plane/docs/guide-four-channel-plane.html All 4 channels are now correct in manual mode or guided mode. I thought I was done but noticed a strange and probably catastrophic situation where my TX trims are backwards. The main stick input is correct but the trim button moves the control surface the wrong way. Any ideas?? I’m using Taranis Open TX it’s probably something to do with that not ‘plane’ but if anybody has a clue please let me know! thx
Don’t worry about it. I’m not sure exactly why it’s doing it but I’d guess it but I’d guess it had to do with what had to be reversed (TX or AP) and where you had to reverse it.
But, more importantly: Turn off your trims! You should never use the trims on your radio with Arduplane, it will confuse the FC. Use SERVO_AUTO_TRIM = 1. Fly around for a bit in FBWA and it will take care of the rest.
If you use the radio trims like you would with a traditional RC the FC becomes confused about the neutral positions. For example, if you put in a few clicks of aileron trim then when you put the stick in the middle then the FC won’t see “neutral/1500” it will only see 1520 or what ever. So the FC will think you want to turn all the time and it will oblige.
Hmmm that’s is interesting Thanks! I did not know about that! I will definitely try that. Very interesting how it corrects trim not only in guided modes but manual as well. You must have to fly in a guided mode for it to set itself though eh?? Or will it trim itself out in manual mode as well?? At any rate I think I would like to understand and correct the reversed trim first just so I know what’s going on.
SERVO_AUTO_TRIM will only make the changes in modes like FBWA/B, AUTO, etc, but the change is good for all modes. So once it’s in trim you shouldn’t need any adjustment when you go into manual mode.
It will only adjust so much, so if you notice that it needs more trim you’ll need to fix that mechanically then let it do the fine tuning.
As for why it’s backwards, the more I think about it the more I think it must be in the radio if your stick movements are correct. The FC doesn’t care if it’s the stick or the trim moves the set point, so if the stick is going one direction but the trim is going the other then my bet is on the radio. I’m going to tinker with mine to see if I can figure out why.
When you made any changes did you set any of your channel weights to -100%? If so that may be the problem. I found if I set my weight to -100% the stick went opposite the direction of the trim.
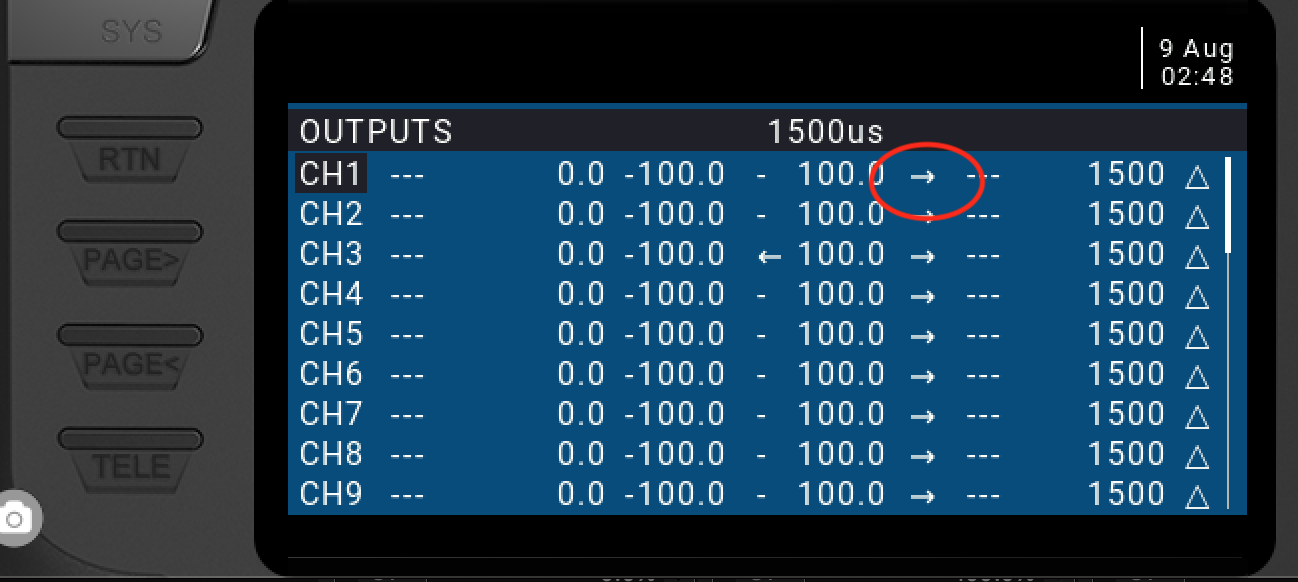
If that’s the case, reset your channel weight to +100% and then do the needed stick reversal in the Output page. There’s a little arrow on the output page. Scroll over and change that.
Allister… Yea you are correct!! Thanks!!I reversed the channel on my TX then went back in the ‘plane’ params and switched RC#_REVERSE and this corrected the problem. Now the TX stick and trim button are in agreement as are all correct movements in any guided mode. Surely that is a mistake in Open TX? I can’t imagine why if you changed the weight from -78 to +78 or whatever that it would ONLY effect the stick not the trim. Incidentally while on the subject I now realize there is RC#_REVERSE which controls servo direction in manual mode but if it’s wrong in any guided mode that would get changed in SERVO#_REVERSE. I was pulling my hair out once on another plane I literally bought a servo reversing cable to connect between the RX and servo I could not for the life of me figure it out. Now I know!! Thanks again for the heads up on the auto trim I will try that. ‘plane’ just keeps getting better!
Hey on a similar subject… do you know how to increase or decrease the ‘weight’ of control the pilot has on the control surfaces in FBWA mode? I tried that mode on my last plane and I barely had enough influence to make it turn around and not fly away. The controller had too much influence I had not enough. Any idea how to adjust / correct that? Thanks
I did some digging while I was looking at this and this isn’t a mistake. I guess it had to do with how the input from the stick and the trim are handled under the hood and that they don’t get processed together until after the stick input has gone though its weight adjustment. One note said if the weight was affected by the trim adjustment that would open up some other real nasty cans of worms, especially when you start running multiple rates. In short it’s better to reverse the output than reverse the weight. I’m sure there’s a use case for reversing the weight and that’s why they leave the functionality there.
Some times you get into a situation where the stick input is correct, but the FC’s stabilization correction is backwards. In that case you need to reverse the servo output in ArduPlane, AND reverse the stick output in the radio. Or, if the stick and the FC are both backwards, then you only need to reverse the servo output in Arduplane. At the end of the day you have two things (the TX and FC) both trying to control one surface so there’s bound to be confusion. And since servo installation directions and movements have no standard whatever way they run the output will be wrong for somebody.
BTW, I don’t use RCx_REVERSE. I switch the RC in the radio, and then use SERVOx_REVERSE (or the little tick box in MP) to change the servo. Although I can’t think of a reason why one way is better than the other. I guess some radios it may be harder or not possible to reverse their signal.
There’s a whole new set of tuning instructions for 4.1. I’ve only got one plane on 4.1 so far but I’ve found that after the autotune the responsiveness was much improved over 4.0.x. I would read up on the new tuning guides applicable to 4.1 because I think with the new rate controller you should be able to tune it in just how you want.
There’s a new link for tuning in 4.1 that really goes into things. Roll, Pitch and Yaw Controller Tuning — Plane documentation
Great points. I did not even know about reversing in that outputs page in open TX I thought the only way was to change the weights. That sure makes sense and it always seemed crazy it had to get that complicated to simply reverse a servo especially when you have duel rates that meant I had to adjust two things not just one. re-“Some times you get into a situation where the stick input is correct, but the FC’s stabilization correction is backwards.” yes that is exactly what I was running into! I’ve been hesitant to try auto tune but it has been around awhile now and probably more stable so I’ll probably give that a try after I use Auto Trim. Thanks for your help and the new tuning link!
1 Like