Hi everyone,
We’re a student team developing a VTOL aircraft in a Tricopter configuration. We’re reaching out for help after running into an issue during our first hover test. Here’s some details on the VTOL’s setup:
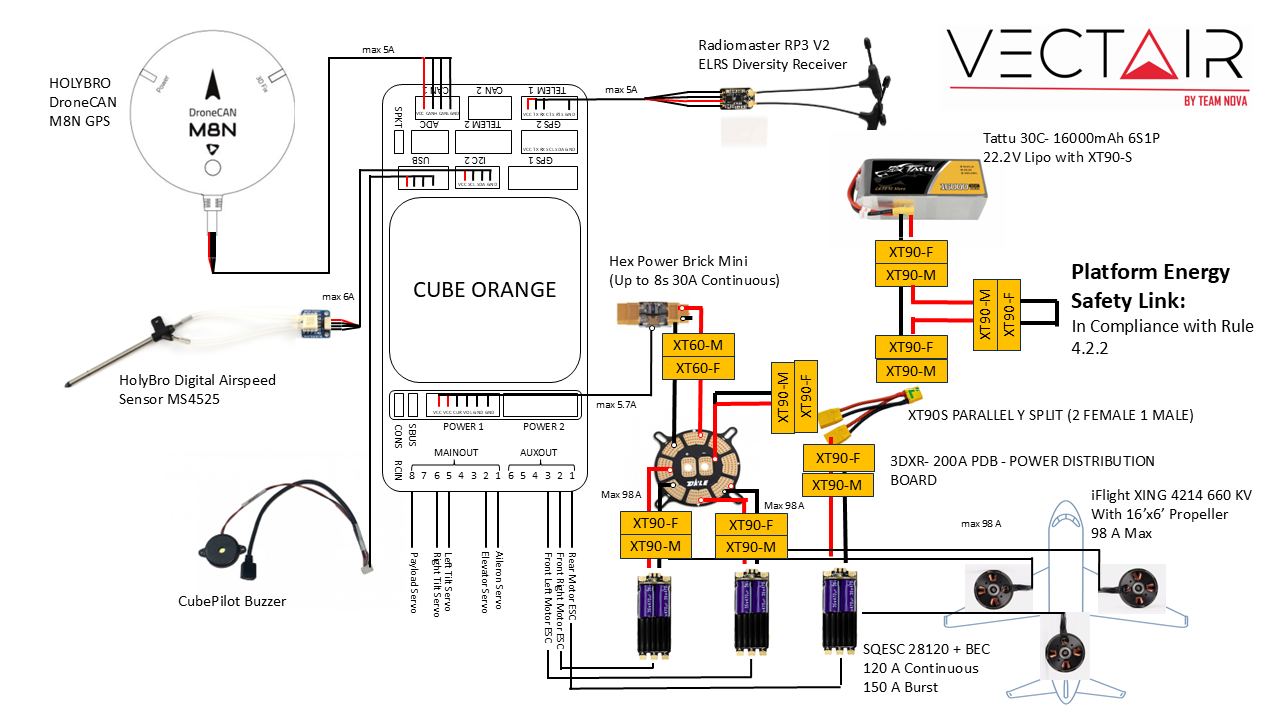
Our setup consists of two front tilting motors and a single fixed rear motor, with yaw control provided through vectored thrust by tilting the front motors. The flight controller we’re using is the Cube Orange, running ArduPilot firmware. Our motors are iFlight XING X4214 660KV (2–8S) class, paired with Sequre SQESC 28120 ESCs, all powered by a 6S 16000mAh Tattu LiPo battery. The power distribution is managed by a 200A PDB. While each motor is rated for 98A, we originally intended to use a 400A PDB , but it was out of stock. As a workaround, we used our existing 200A PDB to power the front motors, and powered the third motor (rear) separately using a Y-splitter from the battery, allowing the ESC to regulate voltage directly. For RC communication, we use a Radiomaster TX16S with an ELRS Micro TX module and a Radiomaster RP3 ELRS receiver that also has telemetry capability. GPS is provided by the DroneCAN M8N Module. I’ve attached a picture of the wiring diagram in this post.
We recently attempted our first vertical hover test. We did a basic motor test beforehand to check if all motors were spinning in the correct direction, and that was successful. During this hover attempt, the VTOL kept pitching forwards as throttle was increased. When we talked to the pilot, he said that it felt like the pitch was behaving inversely — pushing nose-up led to more nose-down movement, suggesting that pitch control may perhaps be reversed or misconfigured? I’ve attached a youtube link of a video showing the forward tilt during testing, and also have the flight log (.bin file is in the google drive link as it was too big for this forum) and parameters from the Cube Orange if anyone is able to take a look and help diagnose the problem. Any advice on what might be wrong or what might be good to check would be extremely helpful. Thanks!
Video of hover test:

Flight Log:
VTOL_Term2.param (22.6 KB)