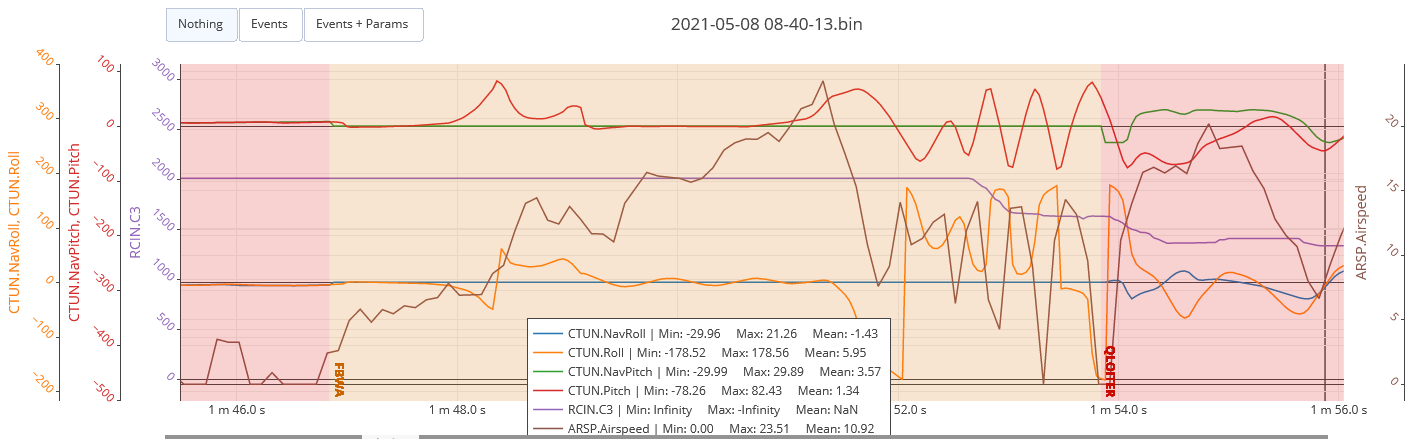
I have my vehicle flying well in FBWA, and QLOITER, QHOVER and QSTABILIZE. I’ve been launching the aircraft by hand in forward-flight mode in order to get fixed-wing flying tuned and developed, and it is a beautiful and nominal transition from Forward-Flight to hover, no issues there. What I’ve not been able to get to work is going from hover to forward-flight. The above plot is from an attempt last Saturday, running a nightly build of v4.1.0dev from February, shortly after this issue was resolved: https://github.com/ArduPilot/ardupilot/pull/16758. R/C channels for roll and pitch were centered in the attempt.
The vehicle is the MiniHawk-VTOL, an open-access 3D-printed design that is in development; it is similar to the Convergence VTOL, except that the tilt servo linkages are mildly non-linear, but close enough that I hope they can be assumed linear.
Q_TILT_MAX = 55
Q_OPTIONS has the LevelTransition Bit set
Q_TILT_RATE_DN = 50
Q_TRANSITION_MS = 4000
ARSPD_FBW_MIN = 17 (Aircraft stalls around 14 or 15)
Let me know if other data is needed.
