Hi,
I want to convert a Tricopter I have to Arducopter to test some of the new stuff in 4.1.
The tricopter flew great wit dRonin, and is later used to test a special tricopter firmware with iNav.
But being more into Ardupilot, I also want my Tricopter moved to Arducopter.
I have some question marks about if the setup will work as I have in mind so am asking to see if there is anyone who can answer some of those to calm me down 
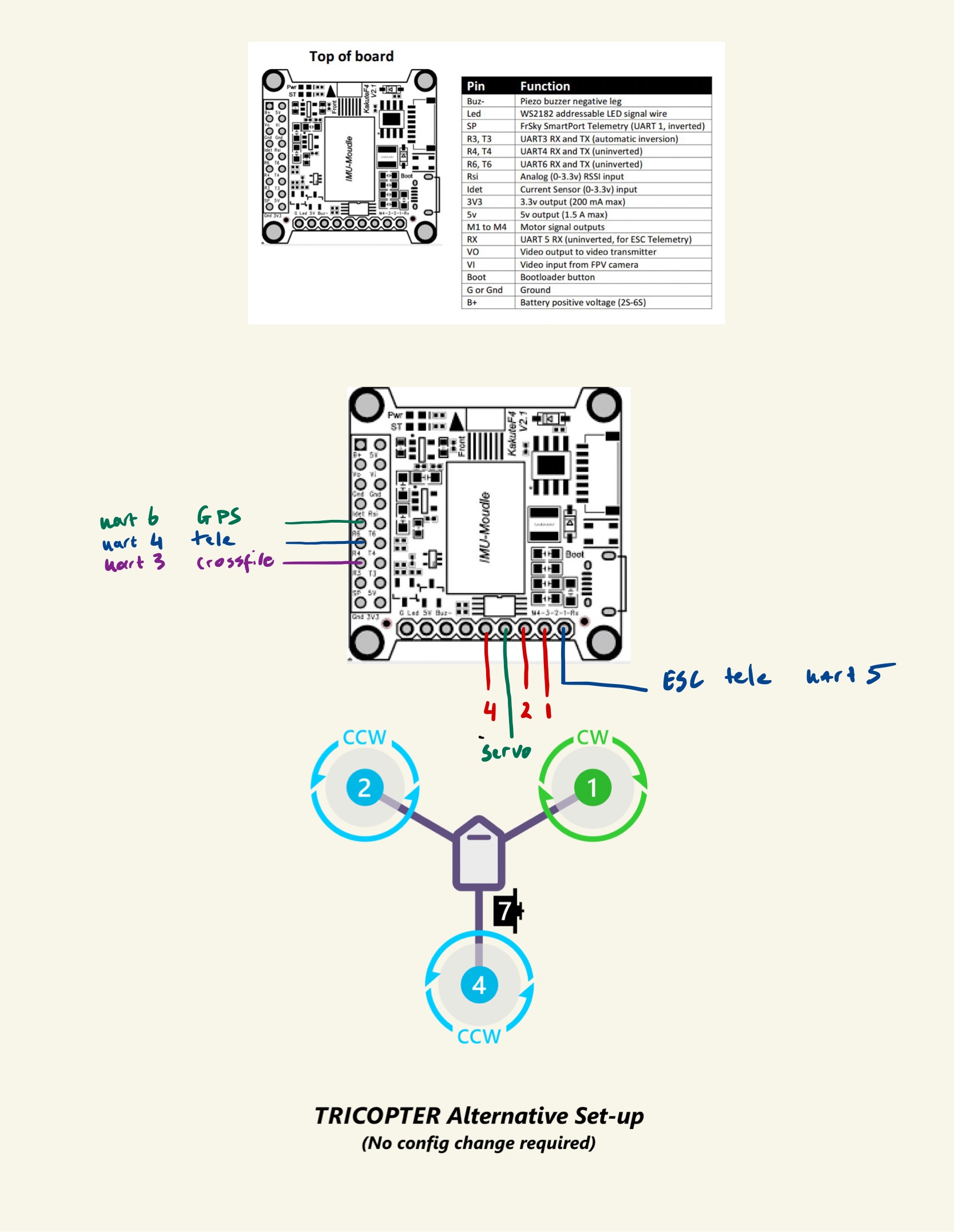
First things first, I’m currently using the kakuteF4 v2.
The uarts on it are limited. I use a kakuteF4v2 on a 7" quad with ardopter to test some of the new features also… so know the board works fine with ardupilot.
I’m a bit confused about the motor setup and what pins to use.
Currently the motor order is that from the inav build and was hoping I could just change it in mission planner without having to resolder, but I think it’s better to start from scratch and rewire the motor order anyway.
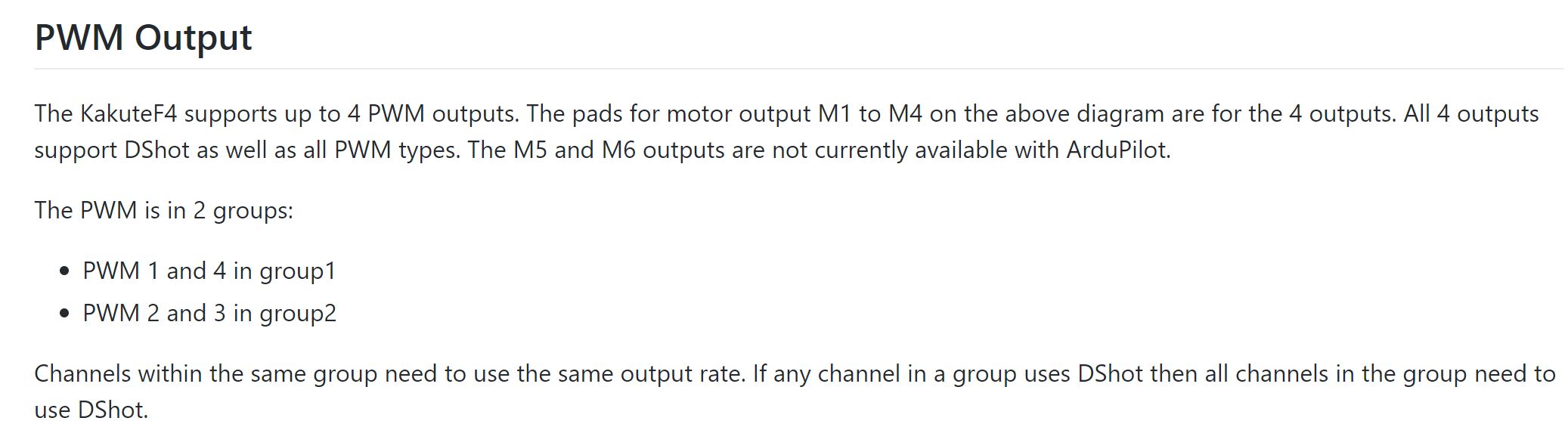
I’m using d-shot and want to keep using that (one of the test criteria), the motors spin fine with the motor test and have the esc’s set to dshot 150.
The servo is what is confusing me… I know there are only 4 pwm ports on the kakutef4v2 and that they are basicly 2 timing groups? (someone told me)
Can I use the wiring as shown in the attached picture, using M3 for the servo and setup motorxfunction as 39?
One other thing i want to test is the Yaapu telemetry script with crossfire and mavlink on openTX.
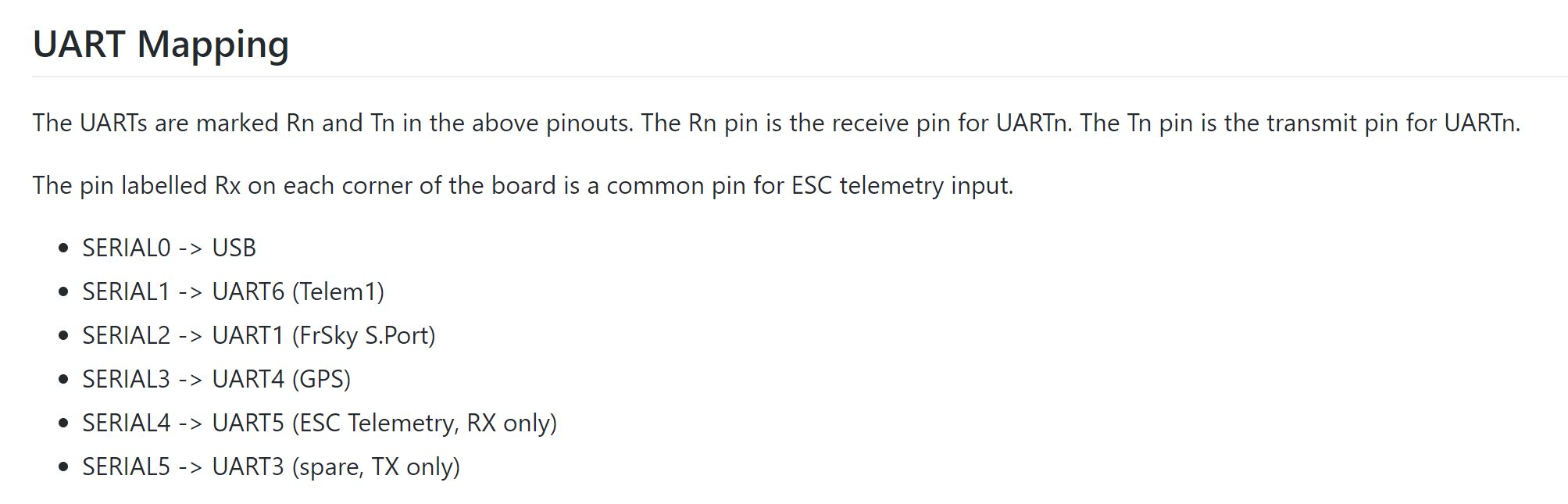
For that to work I need 2 uarts, but reading the documentation on the Ardupilot wiki uart 3 seems to be RX only. Is this still the case.
The plan is to use crossfire rx/tx on uart 3 and mavlink telemetry on uart 4.
Any help will be greatly appreciated